|
10 |
RAMS 2022 |
Posts Tagged with "PMHF"
既に発行済みのブログであっても適宜修正・追加することがあります。We may make changes and additions to blogs already published.
IFの状態確率は前記事の表、SMの状態確率は以前の表368.2に基づき、(a)~(c)まで場合分けして積分方程式を立てます。被積分関数は状態確率×遷移確率(微小確率)で表されます。遷移確率は条件付き確率です。この状態確率のうち IF関連をグリーン、SM関連項をブルーで表します。また遷移確率をレッドで表します。この色分けは表の色分けとは関係ありません。
(a)からのSPF確率の時間平均は、IFが(2)、SMが(10)+(12)の条件から、 $$ \begin{eqnarray} \overline{q_{\mathrm{SPF(a),IFU}}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\mathrm{SPF\ via\ (a)\ at\ }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{OPR_\overline{prev}\ at\ }t\cap\mathrm{IF\ down\ in\ }(t, t+dt]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\bbox[#ccffcc,2pt]{(1-K_\mathrm{IF,RF})R_\mathrm{IF}(t)}\bbox[#ccffff,2pt]{A_\mathrm{SM}(t)}\bbox[#ffcccc,2pt]{\lambda_\mathrm{IF}dt}\\ &\approx&(1-K_\mathrm{IF,RF})\lambda_\mathrm{IF}-(1-K_\mathrm{IF,RF})\alpha,\\ \text{ただし、}\\ \alpha&:=&\frac{1}{2}\lambda_\mathrm{IF}\lambda_\mathrm{SM}\left[(1-K_\mathrm{SM,MPF})T_\text{lifetime}+K_\mathrm{SM,MPF}\tau\right] \end{eqnarray} \tag{376.1} $$ (b)からのSPF確率の時間平均は、IFが(2)、SMが(9)+(11)の条件から、 $$ \begin{eqnarray} \overline{q_{\mathrm{SPF(b),IFU}}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\mathrm{SPF\ via\ (b)\ at\ }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{LAT2_\overline{prev}\ at\ }t\cap\mathrm{IF\ down\ in\ }(t, t+dt]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\bbox[#ccffcc,2pt]{(1-K_\mathrm{IF,RF})R_\mathrm{IF}(t)}\bbox[#ccffff,2pt]{Q_\mathrm{SM}(t)}\bbox[#ffcccc,2pt]{\lambda_\mathrm{IF}dt}\\ &\approx&(1-K_{\text{IF,RF}})\alpha,\\ ただし、\\ \alpha&:=&\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}\left[(1-K_{\mathrm{SM,MPF}})T_\text{lifetime}+K_{\mathrm{SM,MPF}}\tau\right] \end{eqnarray} \tag{376.2} $$ (c)からのDPF確率の時間平均は、IFが(4)+(6)+(8)、SMが(9)+(11)の条件から、 $$ \begin{eqnarray} \overline{q_{\mathrm{DPF(c),IFR}}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\mathrm{DPF\ via\ (c)\ at\ }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{LAT2_\text{prev}\ at\ }t\cap\mathrm{IF\ down\ in\ }(t, t+dt]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\bbox[#ccffcc,2pt]{K_\mathrm{IF,RF}\left[K_\text{IF,MPF}\color{red}{K_\text{IF,det}}R_\mathrm{IF}(t)+\color{red}{(1-K_\text{IF,det})}A_\mathrm{IF}(t)\right]}\\ & &\qquad\qquad\cdot\bbox[#ccffff,2pt]{Q_\mathrm{SM}(t)}\bbox[#ffcccc,2pt]{\lambda_\mathrm{IF}dt}\\ &\approx&K_{\text{IF,RF}}\color{red}{K_\text{IF,det}}\alpha+K_{\text{IF,RF}}\color{red}{(1-K_\text{IF,det})}\beta,\\ ただし、\\ \alpha&:=&\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}\left[(1-K_{\mathrm{SM,MPF}})T_\text{lifetime}+K_{\mathrm{SM,MPF}}\tau\right],\\ \beta&:=&\frac{1}{2}\lambda_\mathrm{IF}\lambda_\mathrm{SM}\left[(1-K_\mathrm{MPF})T_\text{lifetime}+K_\mathrm{MPF}\tau\right],\\ K_\mathrm{MPF}&:=&K_\mathrm{IF,MPF}+K_\mathrm{SM,MPF}-K_\mathrm{IF,MPF}K_\mathrm{SM,MPF} \end{eqnarray} \tag{376.3} $$ (d)からのDPF確率の時間平均は、IFが(3)+(5)+(7)、SMが(10)+(12)の条件から、 $$ \begin{eqnarray} \overline{q_{\mathrm{DPF(d),IFR}}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\mathrm{DPF\ via\ (d)\ at\ }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{LAT1\ at\ }t\cap\mathrm{SM\ down\ in\ }(t, t+dt]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\bbox[#ccffcc,2pt]{K_\mathrm{IF,RF}\left[K_\text{IF,MPF}\color{red}{K_\text{IF,det}}F_\mathrm{IF}(t)+\color{red}{(1-K_\text{IF,det})}Q_\mathrm{IF}(t)\right]}\\ & &\qquad\qquad\cdot\bbox[#ccffff,2pt]{A_\mathrm{SM}(t)}\bbox[#ffcccc,2pt]{\lambda_\mathrm{IF}dt}\\ &\approx&K_{\text{IF,RF}}\color{red}{K_\text{IF,det}}\alpha+K_{\text{IF,RF}}\color{red}{(1-K_\text{IF,det})}\beta,\\ ただし、\\ \alpha&:=&\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}\left[(1-K_{\mathrm{SM,MPF}})T_\text{lifetime}+K_{\mathrm{SM,MPF}}\tau\right],\\ \beta&:=&\frac{1}{2}\lambda_\mathrm{IF}\lambda_\mathrm{SM}\left[(1-K_\mathrm{MPF})T_\text{lifetime}+K_\mathrm{MPF}\tau\right],\\ K_\mathrm{MPF}&:=&K_\mathrm{IF,MPF}+K_\mathrm{SM,MPF}-K_\mathrm{IF,MPF}K_\mathrm{SM,MPF} \end{eqnarray} \tag{376.4} $$
追記:このまとめを記事#492に記述しました。
RAMS 2022においてMPF detectedの再考に基づくPMHF式の論文発表が終了したため、秘匿部分を開示します。
記事#368で、変更した方式(MPF latentに含めていたMPF detectedを分離)により場合分けをしましたが、従来の方式(MPF detected=MPF latent)でも、確認のために同様な表を作成します。
| Non preventable $1-K_\text{IF,RF}$ |
Faulty $(1-K_\text{IF,RF})F_\text{IF}(t)$ |
(1) IF down=RF | ||
| Faultless $(1-K_\text{IF,RF})R_\text{IF}(t)$ |
(2) IF up | |||
| Preventable $K_\text{IF,RF}$ |
SM1 detectable $K_\text{IF,det}$ |
Faulty $K_\text{IF,RF}K_\text{IF,det}F_\text{IF}(t)$ |
(3) IF down=LF | |
| Faultless $K_\text{IF,RF}K_\text{IF,det}R_\text{IF}(t)$ |
(4) IF up | |||
| SM1 undetectable $1-K_\text{IF,det}$ |
SM2 detectable $K_\text{IF,MPF}$ |
Faulty $K_\text{IF,RF}(1-K_\text{IF,det})K_\text{IF,MPF}F_\text{IF}(u)$ |
(5) IF down=LF | |
| Faultless $K_\text{IF,RF}(1-K_\text{IF,det})K_\text{IF,MPF}R_\text{IF}(u)$ |
(6) IF up | |||
| SM2 undetectable $1-K_\text{IF,MPF}$ |
Faulty $K_\text{IF,RF}(1-K_\text{IF,det})(1-K_\text{IF,MPF})F_\text{IF}(t)$ |
(7) IF down=LF | ||
| Faultless $K_\text{IF,RF}(1-K_\text{IF,det})(1-K_\text{IF,MPF})R_\text{IF}(t)$ |
(8) IF up | |||
◆色分け:
Faultless, フォールト無し
Faulty, フォールトする
Faultyだが定期修理される
(5)及び(6)においてはSM2(2nd SM)によって検出されたフォールトは周期的に修理されるため、信頼度及び不信頼度は時刻tではなく$u(:=t \bmod \tau)$の関数で表されます。
RAMS 2022においてMPF detectedの再考に基づくPMHF式の論文発表が終了したため、秘匿部分を開示します。
|
23 |
MPF detectedへの変更の再検討 |
前稿までで検討してきたMPF detectedへの変更ですが、一点問題があるようです。ブログ記事#362において、
$$ \begin{eqnarray} \Pr\{\mathrm{LAT2\ at\ }t\}&=&\Pr\{(\mathrm{IF^R\ up\ at\ }t\\ & &\color{red}{\cup\ (\mathrm{IF^R\ down\ at\ }t\ \cap\ \mathrm{IF^R\ detectable}\ \cap\ \mathrm{IF^R\ preventable})})\\ & &\cap\ \mathrm{SM\ down\ at\ }t\}\\ &=&(\Pr\{\mathrm{IF^R\ up\ at\ }t\}+\Pr\{\mathrm{IF^R\ down\ at\ }t\}\\ & &\color{red}{\cdot\Pr\{\mathrm{IF^R detectable}\ |\ \mathrm{IF^R preventable}\}}\cdot\Pr\{\mathrm{IF^R preventable}\})\\ & &\cdot\Pr\{\mathrm{SM\ down\ at\ }t\}\\ &=&\left[(1-K_{\text{IF,RF}})R_\text{IF}(t)+K_{\text{IF,RF}}A_\text{IF}(t)+\color{red}{K_\text{det}}K_\text{IF,RF}Q_\text{IF}(t)\right]Q_{\mathrm{SM}}(t) \end{eqnarray}\tag{362.2} $$ と、 $$ \Pr\{\mathrm{IF^U\ down\ in\ }(t, t+dt]\ |\ \mathrm{LAT2\ at\ }t\}\\ =\Pr\{\mathrm{IF^U\ down\ in\ }(t, t+dt]\ |\ \mathrm{IF^U\ up\ at\ }t\cap\ \mathrm{SM\ down\ at\ }t\}\\ =\Pr\{\mathrm{IF^U\ down\ in\ }(t, t+dt]\ |\ \mathrm{IF^U\ up\ at\ }t\}=\lambda_{\mathrm{IF}}dt\tag{362.4} $$ で、LAT2の定義が異なっています。(362.4)のLAT2を(362.2)のように修正すべきですが、そうするとdownしているときのdownの意味が分からなくなります。
この矛盾が生じた理由は、IF upの定義を従来から変更したことにあります。新旧の定義を便宜上(new),(old)で表せば、 $$ \{\mathrm{IF\ (new)\ up\ at\ }t\}=\{(\mathrm{IF^R\ (old)\ up\ at\ }t\\ \color{red}{\cup\ (\mathrm{IF^R\ down\ at\ }t\ \cap\ \mathrm{IF^R\ detectable}\ \cap\ \mathrm{IF^R\ preventable})})\\ $$
このように左辺と右辺ではIF upの定義が異なっています。正しくは、IF upはIF upであり、IF downは含みません。つまり(362.2)が誤っていました。従って、(362.2)のLAT2を見直す必要があります。
RAMS 2022においてMPF detectedの再考に基づくPMHF式の論文発表が終了したため、秘匿部分を開示します。
|
17 |
MPF detectedへの変更のまとめ |
前稿#222と同様な表を用いて、MPF detectedへの変更をまとめます。
| (1)SPF | (2)DPF1 | (3)DPF2 | ||
|---|---|---|---|---|
| LAT2統合 | $(1-K_\text{IF,RF})\lambda_\text{IF}-(1-K_\text{IF,RF})\alpha$ (361.5) |
$(1-K_\mathrm{IF,RF}+K_\text{IF,RF}\color{red}{K_\text{IF,det}})\alpha\\+K_\mathrm{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta$(362.6) | $K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}\beta$ (363.4) |
|
| 規格式1$\dagger$ | $(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\color{red}{K_\text{IF,det}}\alpha+K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}\beta$ (364.1) |
|||
| 規格式3$\dagger$ | $(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\color{red}{K_\text{IF,det}}\alpha +2K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}\beta$ | |||
| (1)SPF | (2b)SPF' | (2a)DPF1 | (3)DPF2 | |
| LAT2分離 | $(1-K_\text{IF,RF})\lambda_\text{IF}-(1-K_\text{IF,RF})\alpha$ | $(1-K_\text{IF,RF})\alpha$ | $K_\text{IF,RF}\color{red}{K_\text{IF,det}}\alpha\\+K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}\beta$ | $K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}\beta$ |
| (1)+(2b)SPF | (2a)DPF1 | (3)DPF2 | ||
| SPF統合 | $(1-K_\text{IF,RF})\lambda_\text{IF}$ | $K_\text{IF,RF}\color{red}{K_\text{IF,det}}\alpha\\+K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}\beta$ | $K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}\beta$ | |
| SPF/DPF統合 | $(1-K_\text{IF,RF})\lambda_\text{IF}$ | $K_\text{IF,RF}\color{red}{K_\text{IF,det}}\alpha\\+2K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}\beta$ | ||
$$ ただし、\begin{cases} \begin{eqnarray} 非冗長系の時は\color{red}{K_\text{IF,det}}&=&1\\ 冗長系の時は\color{red}{K_\text{IF,det}}&=&0, K_\text{IF,RF}=1\\ \end{eqnarray} \end{cases} $$
$\dagger$規格式1: 規格第1版 Part 10-8.3.3の第1式(ブログの図104.2)の条件=IFが後にフォールトする場合=(1)SPF及び(2)DPF1。(3)DPF2はSMが後にフォールトする場合なので対象外
$\dagger$規格式3: 規格第1版 Part 10-8.3.3の第3式(ブログの図105.2)の条件=IF, SMのフォールトの順を問わない場合=(1)SPF及び(2)DPF1及び(3)DPF2
RAMS 2022においてMPF detectedの再考に基づくPMHF式の論文発表が終了したため、秘匿部分を開示します。
|
16 |
PMHF導出法の変更 (5) |
よって、MPF detectedを考慮した場合のPMHFは、それぞれの事象は排他であることから、(361.5)、(362.6)、(363.4)で求められた平均PUDを全て加えることで求められ、 $$ \begin{eqnarray} \require{cancel} M_\text{PMHF}&=&\overline{q_\mathrm{SPF,IFU}}+\overline{q_\mathrm{DPF1,IFR}}+\overline{q_\mathrm{DPF2, IFR}}\\ &=&(1-K_\text{IF,RF})\lambda_\text{IF}-\bcancel{(1-K_\text{IF,RF})\alpha}+\bcancel{(1-K_\text{IF,RF})\alpha}+K_\text{IF,RF}\color{red}{K_\text{IF,det}}\alpha\\ & &+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta+K_\text{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta\\ &=&\bbox[#ccffff,2pt]{(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\color{red}{K_\text{IF,det}}\alpha+2K_\mathrm{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta}\\ &=&(1-K_\text{IF,RF})\lambda_\text{IF}+\frac{1}{2}K_\text{IF,RF}\color{red}{K_\text{IF,det}}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_\mathrm{SM,MPF})T_\text{lifetime}+K_\mathrm{SM,MPF}\tau]\\ & &+K_\mathrm{IF,RF}\color{red}{(1-K_\text{IF,det})}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_{\mathrm{MPF}})T_\text{lifetime}+K_{\mathrm{MPF}}\tau],\\ \end{eqnarray}\tag{364.1} $$
$$ ただし、\begin{cases} \begin{eqnarray} \alpha&:=&\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_\mathrm{SM,MPF})T_\text{lifetime}+K_\mathrm{SM,MPF}\tau]\\ \beta&:=&\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_{\mathrm{MPF}})T_\text{lifetime}+K_{\mathrm{MPF}}\tau]\\ K_{\mathrm{MPF}}&:=&K_{\mathrm{IF,MPF}}+K_{\mathrm{SM,MPF}}-K_{\mathrm{IF,MPF}}K_{\mathrm{SM,MPF}} \end{eqnarray} \end{cases} $$ この一般式に対して場合分けを行って、
非冗長系においては抑止されるフォールトは全て検出可能なので、$K_\text{IF,det}=1$とすれば、 $$ M_\text{PMHF,NRD}=\bbox[#ccffff,2pt]{(1-K_\text{IF,RF})\lambda_\text{IF}+K_\text{IF,RF}\alpha}\\ =(1-K_\text{IF,RF})\lambda_\text{IF}+\frac{1}{2}K_\text{IF,RF}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_\mathrm{SM,MPF})T_\text{lifetime}+K_\mathrm{SM,MPF}\tau] \tag{364.2} $$
冗長系においては抑止されるフォールトは(1st SMでは)全て検出不可であり、一方全て抑止されるため、$K_\text{IF,det}=0, K_\text{IF,RF}=1$とすれば、 $$ M_\text{PMHF,RD}=\bbox[#ccffff,2pt]{2\beta}=\lambda_\mathrm{IF}\lambda_\mathrm{SM}[(1-K_\mathrm{MPF})T_\text{lifetime}+K_\mathrm{MPF}\tau] \tag{364.3} $$ このように、非冗長系と冗長系に対するPMHF式が導出されます。
非冗長系1.の(364.2)は、規格第1版PMHF第1式と完全に一致しています。

その理由は、規格第1版の前提がIFUモデルだからであり、IFのレイテントフォールトが無い場合、つまりIFの検出されたフォールトは全て即時修理されるモデルだからです。従って、冗長系に適用できないのは当然であり、論文の必然性があったわけです。
RAMS 2022においてMPF detectedの再考に基づくPMHF式の論文発表が終了したため、秘匿部分を開示します。
|
15 |
PMHF導出法の変更 (4) |
LAT1⇒DPF2の平均PUDの計算
次にLAT1からDPF2の平均PUDを計算します。同様に、LAT1の状態確率が前稿#105と比べて変化します。具体的にはIFのVSG preventable部分の確率が下がります。
前稿#105の式(105.1)はそのままです。LAT1からDPF2への平均PUDは、 $$ \begin{eqnarray} \overline{q_{\mathrm{DPF2,IFR}}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\mathrm{DPF2\ at\ }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{LAT1\ at\ }t\cap\mathrm{SM\ down\ in\ }(t, t+dt)\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{SM\ down\ in\ }(t, t+dt]\ |\ \mathrm{LAT1\ at\ }t\}\\ & &\ \ \ \ \cdot\Pr\{\mathrm{LAT1\ at\ }t\} \end{eqnarray} \tag{363.1} $$ LAT1の状態確率に対する条件を求めます。IFのフォールトのうちMPF detectedはlatentとならず、直ちに修理されるものとみなされるため、LAT1は
- IFの不稼働状態、かつ
- SM1によりVSGは抑止され、かつSM1により検出されず、かつ
- SM2により検出されず、かつ
- SM1の稼働状態
のようにこの条件が追加されます。これを確率式で書くと以下のように赤字の条件が加わります。さらに(355.1)を用いて書き換えると、 $$ \Pr\{\mathrm{LAT1\ at\ }t\}=\Pr\{\mathrm{IF\ down\ at\ }t\cap\text{IF preventable}\\ \cap\color{red}{\text{IF not detected }}\cap\mathrm{SM\ up\ at\ }t\}\\ =\Pr\{\mathrm{IF^R\ down\ at\ }t\}\Pr\{\text{IF preventable}\}\color{red}{\Pr\{\text{IF not detected}\}}\Pr\{\mathrm{SM\ up\ at\ }t\}\\ =K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}Q_{\mathrm{IF}}(t)A_{\mathrm{SM}}(t)\tag{363.2} $$ と書けます。
一方、 $$ \require{cancel} \Pr\{\mathrm{SM\ down\ in\ }(t, t+dt]\ |\ \mathrm{LAT1\ at\ }t\}\\ =\Pr\{\mathrm{SM\ down\ in\ }(t, t+dt]\ |\\ \mathrm{SM\ up\ at\ }t\cap\bcancel{\mathrm{IF^R\ down\ at\ }t}\cap\bcancel{\text{IF preventable}}\cap\bcancel{\color{red}{\text{IF not detected}}}\}\\ =\Pr\{\mathrm{SM\ down\ in\ }(t, t+dt]\ |\ \mathrm{SM\ up\ at\ }t\}=\lambda_{\mathrm{SM}}dt\tag{363.3} $$ であるから、(363.1)は、 $$ \begin{eqnarray} \overline{q_{\mathrm{DPF2, IFR}}}&=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}Q_{\mathrm{IF}}(t)A_{\mathrm{SM}}(t)\lambda_{\mathrm{SM}}dt\\ &=&\frac{K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\left[(1-K_{\mathrm{IF,MPF}})F_{\mathrm{IF}}(t)+K_{\mathrm{IF,MPF}}F_{\mathrm{IF}}(u)\right]\\ & &\cdot\left[(1-K_\text{SM,MPF})f_\text{SM}(t)+K_\text{SM,MPF}f_\text{SM}(u)\right]dt\\ &\approx&\frac{K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}}{2}\lambda_{\mathrm{SM}}\lambda_{\mathrm{IF}}\left[(1-K_{\mathrm{MPF}})T_\text{lifetime}+K_{\mathrm{MPF}}\tau\right]\\ &=&K_{\mathrm{IF,RF}}\color{red}{(1-K_\text{IF,det})}\beta, \end{eqnarray}\tag{363.4} $$
$$ ただし、\begin{cases} \begin{eqnarray} u&:=&t\bmod\tau\\ \beta&:=&\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_{\mathrm{MPF}})T_\text{lifetime}+K_{\mathrm{MPF}}\tau]\\ K_{\mathrm{MPF}}&:=&K_{\mathrm{IF,MPF}}+K_{\mathrm{SM,MPF}}-K_{\mathrm{IF,MPF}}K_{\mathrm{SM,MPF}}\\ \end{eqnarray}\end{cases} $$
RAMS 2022においてMPF detectedの再考に基づくPMHF式の論文発表が終了したため、秘匿部分を開示します。
|
12 |
PMHF導出法の変更 (3) |
LAT2⇒DPF1の平均PUDの計算
IFRモデルのLAT2からDPF1への平均PUDの計算を行いますが、MPF detectedの寄与分を改訂します。前稿#107での計算を基本として、MPF detectedが即修理となるため、IFのVSG preventable部分の稼働確率が上がります。従って、LAT2のIF preventable部分の稼働確率も同じだけ上がります。
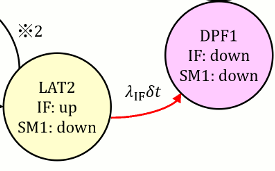
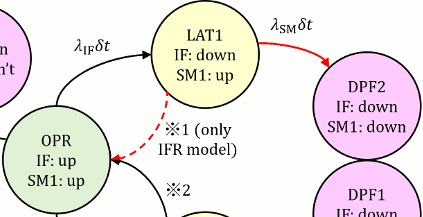
前稿#107の式(107.1)はそのままです。LAT2からDPF1への平均PUDは、 $$ \begin{eqnarray} \overline{q_{\mathrm{DPF1,IFR}}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\mathrm{DPF1\ at\ }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{LAT2\ at\ }t\cap\ \mathrm{IF\ down\ in\ }(t, t+dt]\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{IF\ down\ in\ }(t, t+dt]\ |\ \mathrm{LAT2\ at\ }t\}\\ & &\cdot\Pr\{\mathrm{LAT2}\mathrm{\ at\ }t\} \end{eqnarray} \tag{362.1} $$ LAT2は、基本的にはIFの稼働状態でかつSM1の不稼働状態ですが、MPF detectedの定義である、
- IFの不稼働
- SM1による検出
- VSGとはならない
の3条件を満たす部分も稼働とみなすため、赤字の条件を追加します。さらに(355.1)を用いて書き換えると、 $$ \begin{eqnarray} \Pr\{\mathrm{LAT2\ at\ }t\}&=&\Pr\{(\mathrm{IF^R\ up\ at\ }t\\ & &\color{red}{\cup\ (\mathrm{IF^R\ down\ at\ }t\ \cap\ \mathrm{IF^R\ detectable}\ \cap\ \mathrm{IF^R\ preventable})})\\ & &\cap\ \mathrm{SM\ down\ at\ }t\}\\ &=&(\Pr\{\mathrm{IF^R\ up\ at\ }t\}+\Pr\{\mathrm{IF^R\ down\ at\ }t\}\\ & &\color{red}{\cdot\Pr\{\mathrm{IF^R detectable}\ |\ \mathrm{IF^R preventable}\}}\cdot\Pr\{\mathrm{IF^R preventable}\})\\ & &\cdot\Pr\{\mathrm{SM\ down\ at\ }t\}\\ &=&\left[(1-K_{\text{IF,RF}})R_\text{IF}(t)+K_{\text{IF,RF}}A_\text{IF}(t)+\color{red}{K_\text{det}}K_\text{IF,RF}Q_\text{IF}(t)\right]Q_{\mathrm{SM}}(t) \end{eqnarray}\tag{362.2} $$ となります。この場合、$\Pr\{\mathrm{IF^R\ up\ at\ }t\}$は、$\text{IF preventable}$と$\overline{\text{IF preventable}}$のORであり、DPFの意味では前者のみなのですが、形式上SMがdownしている状態であるため、SPFもDPF扱いとなるので、両方の場合を含めています。ちなみに、 $$ \begin{eqnarray} \Pr\{\mathrm{IF^R\ up\ at\ }t\}&=&\Pr\{(\mathrm{IF^U\ up\ at\ }t\ \cap\ \overline{\text{IF preventable}})\\ & &\cup\ (\mathrm{IF^R\ up\ at\ }t\ \cap\ \text{IF preventable})\}\\ &=&(1-K_{\text{IF,RF}})R_\text{IF}(t)+K_{\text{IF,RF}}A_\text{IF}(t) \end{eqnarray}\tag{362.3} $$ を(362.2)に用いています。
一方、(107.7)と同様に $$ \require{cancel} \Pr\{\mathrm{IF^U\ down\ in\ }(t, t+dt]\ |\ \mathrm{LAT2\ at\ }t\}\\ =\Pr\{\mathrm{IF^U\ down\ in\ }(t, t+dt]\ |\ \mathrm{IF^U\ up\ at\ }t\cap\ \bcancel{\mathrm{SM\ down\ at\ }t}\}\\ =\Pr\{\mathrm{IF^U\ down\ in\ }(t, t+dt]\ |\ \mathrm{IF^U\ up\ at\ }t\}=\lambda_{\mathrm{IF}}dt\tag{362.4} $$ となります。よって、LAT2からDPF1への平均PUDは、 $$ \begin{eqnarray} \overline{q_{\mathrm{DPF1,IFR}}}&=&\frac{1-K_\mathrm{IF,RF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}Q_{\mathrm{SM}}(t)R_{\mathrm{IF}}(t)\lambda_{\mathrm{IF}}dt+\frac{K_\mathrm{IF,RF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}Q_{\mathrm{SM}}(t)A_{\mathrm{IF}}(t)\lambda_{\mathrm{IF}}dt\\ & &+\frac{\color{red}{K_\text{IF,det}}K_\mathrm{IF,RF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}Q_{\mathrm{SM}}(t)(1-A_{\mathrm{IF}}(t))\lambda_{\mathrm{IF}dt}\\ &=&\frac{1-K_\mathrm{IF,RF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}Q_\mathrm{SM}(t)f_{\mathrm{IF}}(t)dt\\ & &+\frac{K_\mathrm{IF,RF}\color{red}{(1-K_\text{IF,det})}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}Q_\mathrm{SM}(t)q_\mathrm{IF}(t)dt\\ & &+\frac{\color{red}{K_\text{det}}K_\mathrm{IF,RF}\lambda_\mathrm{IF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}Q_{\mathrm{SM}}(t)dt\\ &=&\frac{1-K_\mathrm{IF,RF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}[(1-K_\mathrm{SM,MPF})F_{\mathrm{SM}}(t)+K_\mathrm{SM,MPF}F_{\mathrm{SM}}(u)]f_{\mathrm{IF}}(t)dt\\ & &+\frac{K_\mathrm{IF,RF}\color{red}{(1-K_\text{IF,det})}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}[(1-K_\mathrm{SM,MPF})F_{\mathrm{SM}}(t)+K_\mathrm{SM,MPF}F_{\mathrm{SM}}(u)]\\ & &\cdot\left[(1-K_\mathrm{IF,MPF})f_{\mathrm{IF}}(t)+K_\mathrm{IF,MPF}f_{\mathrm{IF}}(u)\right]dt\\ & &+\frac{K_\mathrm{IF,RF}\color{red}{K_\text{det}}\lambda_\text{IF}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}[(1-K_\mathrm{SM,MPF})F_{\mathrm{SM}}(t)+K_\mathrm{SM,MPF}F_{\mathrm{SM}}(u)]dt\\ \end{eqnarray}\tag{362.5} $$ これに(360.5)及び(360.8)を用いて、 $$ \begin{eqnarray} (362.5)&\approx&\frac{1-K_\mathrm{IF,RF}}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_\mathrm{SM,MPF})T_\text{lifetime}+K_\mathrm{SM,MPF}\tau]\\ & &+\frac{K_\mathrm{IF,RF}\color{red}{(1-K_\text{IF,det})}}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1- K_\mathrm{MPF})T_\text{lifetime}+K_\mathrm{MPF}\tau]\\ & &+\frac{K_\mathrm{IF,RF}\color{red}{K_\text{det}}}{2}\lambda_\text{IF}\lambda_\text{SM}[(1-K_\mathrm{SM,MPF})T_\text{lifetime}+K_\mathrm{SM,MPF}\tau]\\ &=&(1-K_\mathrm{IF,RF}+K_\text{IF,RF}\color{red}{K_\text{det}})\alpha+K_\mathrm{IF,RF}\color{red}{(1-K_\text{IF,det})}\beta, \end{eqnarray}\tag{362.6} $$
$$ ただし、\begin{cases} \begin{eqnarray} u&:=&t\bmod\tau\\ \alpha&:=&\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_\mathrm{SM,MPF})T_\text{lifetime}+K_\mathrm{SM,MPF}\tau]\\ \beta&:=&\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_\mathrm{MPF})T_\text{lifetime}+K_\mathrm{MPF}\tau]\\ K_\mathrm{MPF}&:=&K_\mathrm{IF,MPF}+K_\mathrm{SM,MPF}-K_\mathrm{IF,MPF}K_\mathrm{SM,MPF}\\ &=&1-(1-K_\mathrm{IF,MPF})(1-K_\mathrm{SM,MPF}) \end{eqnarray} \end{cases} $$
RAMS 2022においてMPF detectedの再考に基づくPMHF式の論文発表が終了したため、秘匿部分を開示します。
|
11 |
PMHF導出法の変更 (2) |
前稿#355の続きです。変更方針はMPF latentに分類していたMPF detectedを即時修理とするものです。従って、MPF detectedは故障しないことと等価です。
OPR⇒SPFの平均PUDの計算
従来はMPF detectedをMPF latent扱いにしていたものを、MPF detectedに変更しました。MPFの意味はVSG preventableなIFのフォールトであるため、SPFの計算に影響はありません。従って、以下は前稿#103と同様です。
OPRステートからSPFステートへの平均PUD(66.13)を計算します。
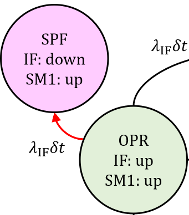
OPRからSPFへの平均PUDは、 $$ \begin{eqnarray} \overline{q_{\mathrm{SPF,IFU}}}&=&\frac{1}{T_\text{lifetime}}\Pr\{\mathrm{SPF\ at\ }T_\text{lifetime}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{OPR\ at\ }t\cap\mathrm{IF\ down\ in\ }(t, t+dt]\cap\overline{\mathrm{IF\ preventable}}\}\\ &=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\Pr\{\mathrm{IF\ down\ in\ }(t, t+dt]\ |\ \mathrm{OPR\ at\ }t\}\\ & &\ \ \ \ \cdot\Pr\{\mathrm{OPR\ at\ }t\}\Pr\{\overline{\mathrm{IF\ preventable}}\} \end{eqnarray} \tag{361.1} $$ ここでOPRは、 $$ \begin{eqnarray} \Pr\{\mathrm{OPR\ at\ }t\}&=&\Pr\{\mathrm{IF\ up\ at\ }t\cap\mathrm{SM\ up\ at\ }t\}=\Pr\{\mathrm{IF^U\ up\ at\ }t\}\Pr\{\mathrm{SM\ up\ at\ }t\}\\ &=&R_\mathrm{IF}(t)A_\mathrm{SM}(t)\end{eqnarray}\tag{361.2} $$
一方、(361.1)の右辺積分中の条件付き確率式は、 $$ \Pr\{\mathrm{IF^U\ down\ in\ }(t, t+dt]\ |\ \mathrm{OPR\ at\ }t\}\\ =\Pr\{\mathrm{IF^U\ down\ in\ }(t, t+dt]\ |\ \mathrm{IF^U\ up\ at\ }t\cap\text{SM up at }t\}\\ =\Pr\{\mathrm{IF^U\ down\ in\ }(t, t+dt]\ |\ \mathrm{IF^U\ up\ at\ }t\}=\lambda_{\mathrm{IF}}dt \tag{361.3} $$ よって平均PUDは、 $$ \begin{eqnarray} \overline{q_{\mathrm{SPF,IFU}}}&=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}(1-K_{\mathrm{IF,RF}})R_\mathrm{IF}(t)A_\mathrm{SM}(t)\lambda_{\mathrm{IF}}dt\\ &=&\frac{1-K_{\mathrm{IF,RF}}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\left[1-Q_\text{SM}(t)\right]f_{\mathrm{IF}}(t)dt\\ &=&\frac{1-K_{\mathrm{IF,RF}}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}f_{\mathrm{IF}}(t)dt-\frac{1-K_{\mathrm{IF,RF}}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}Q_\text{SM}(t)f_{\mathrm{IF}}(t)dt\\ &=&\frac{1-K_{\mathrm{IF,RF}}}{T_\text{lifetime}}F_\text{IF}(T_\text{lifetime})\\ & &-\frac{1-K_{\mathrm{IF,RF}}}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}\left[(1-K_\text{SM,MPF})F_\text{SM}(t)+K_\text{SM,MPF}F_\text{SM}(u)\right]f_{\mathrm{IF}}(t)dt,\\ & &\text{ただし、}u:=t\bmod\tau \end{eqnarray} \tag{361.4} $$ よって、$F_\text{SM}(t)=1-e^{-\lambda_{\mathrm{SM}}t}\approx\lambda_{\mathrm{SM}}t$と近似し、 $$ \begin{eqnarray} (361.4)&\approx&(1-K_{\mathrm{IF,RF}})\lambda_{\mathrm{IF}}-\frac{1-K_{\mathrm{IF,RF}}}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_{\mathrm{SM,MPF}})T_\text{lifetime}+K_{\mathrm{SM,MPF}}\tau]\\ &=&(1-K_{\mathrm{IF,RF}})\lambda_{\mathrm{IF}}-(1-K_{\mathrm{IF,RF}})\alpha,\\ & &\text{ただし、} \alpha:=\frac{1}{2}\lambda_{\mathrm{IF}}\lambda_{\mathrm{SM}}[(1-K_{\mathrm{SM,MPF}})T_\text{lifetime}+K_{\mathrm{SM,MPF}}\tau] \end{eqnarray} \tag{361.5} $$
RAMS 2022においてMPF detectedの再考に基づくPMHF式の論文発表が終了したため、秘匿部分を開示します。
|
10 |
PMHF計算に関する積分公式 (5) |
引き続き、前稿の続きの計算をします。本稿では次の(360.1)及び(360.2)を求めます。 $$ \frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}F_\text{SM}(t)dt\tag{360.1} $$ 及び $$ \frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}F_\text{SM}(u)dt,\quad s.t.\ u:=t\bmod\tau\tag{360.2} $$ まず、(360.1)式に、$F_\text{SM}(t)=1-e^{-\lambda_\text{SM}t}$を代入し、 $$ \require{cancel} \begin{eqnarray} (360.1)&=&\frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}(1-e^{-\lambda_\text{SM}t})dt=\frac{1}{T_\text{lifetime}}\left[t+\frac{e^{-\lambda_\text{SM}t}}{\lambda_\text{SM}}\right]^{T_\text{lifetime}}_0\\ &=&\frac{1}{T_\text{lifetime}}\left(T_\text{lifetime}-\bcancel{0}+\frac{1}{\lambda_\text{SM}}(e^{-\lambda_\text{SM}T_\text{lifetime}}-1)\right)\\ \end{eqnarray}\tag{360.3} $$ ここで$\lambda t\ll 1$の条件で$e^{-\lambda t}$のMaclaurin展開は $$e^{-\lambda t}=1-\lambda t + \frac{1}{2}\lambda^2 t^2-O((\lambda t)^3)$$であるから、$O((\lambda t)^3)\approx 0$と近似し、これを(360.3)に代入すると(360.3)は、 $$ \begin{eqnarray} (360.3)&\approx&\frac{1}{\bcancel{T_\text{lifetime}}}\left(\bcancel{T_\text{lifetime}}+\frac{1}{\bcancel{\lambda_\text{SM}}}(-\bcancel{\lambda_\text{SM}}\bcancel{T_\text{lifetime}}+\frac{1}{2}\lambda_\text{SM}^\bcancel{2}T_\text{lifetime}^\bcancel{2})\right)\\ &=&\bcancel{1}-\bcancel{1}+\frac{1}{2}\lambda_\text{SM}T_\text{lifetime}=\frac{1}{2}\lambda_\text{SM}T_\text{lifetime} \end{eqnarray}\tag{360.4} $$ 以上から次のように(360.1)の値が求められました。
$$ \frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}F_\text{SM}(t)dt\approx\frac{1}{2}\lambda_\text{SM}T_\text{lifetime}\tag{360.5} $$ 次に(360.2)は、 $$ \begin{eqnarray} (360.2)&=&\frac{1}{T_\text{lifetime}}\sum_{i=0}^{n-1}\int_{i\tau}^{(i+1)\tau}(1-e^{-\lambda_\text{SM}u})du =\frac{n}{T_\text{lifetime}}\int_0^\tau\left(1- e^{-\lambda_\text{SM}u}\right)du\\ &=&\frac{\bcancel{n}1}{\bcancel{T_\text{lifetime}}\tau}\left[u\bcancel{-}+\frac{e^{-\lambda_\text{SM}u}}{\bcancel{-}\lambda_\text{SM}}\right]^{\tau}_0 =\frac{1}{\tau}\left(\tau-\bcancel{0}+\frac{1}{\lambda_\text{SM}}\left(e^{-\lambda_\text{SM}\tau}-1\right)\right) \end{eqnarray}\tag{360.6} $$ ここで同様に、$$e^{-\lambda t}\approx1-\lambda t + \frac{1}{2}\lambda^2 t^2$$を用いて、 $$ \begin{eqnarray} (360.8)&=&\frac{1}{\bcancel{\tau}}\left(\bcancel{\tau}+\frac{1}{\bcancel{\lambda_\text{SM}}}\left(-\bcancel{\lambda_\text{SM}}\bcancel{\tau}+\frac{1}{2}\lambda_\text{SM}^\bcancel{2}\tau^\bcancel{2}\right)\right) &=&\bcancel{1}-\bcancel{1}+\frac{1}{2}\lambda_\text{SM}\tau\\ &=&\frac{1}{2}\lambda_\text{SM}\tau \end{eqnarray}\tag{360.7} $$ 以上から次のように(360.2)の値が求められました。 $$ \frac{1}{T_\text{lifetime}}\int_0^{T_\text{lifetime}}F_\text{SM}(u)dt\approx\frac{1}{2}\lambda_\text{SM}\tau,\quad s.t.\ \ u:=t\bmod\tau\tag{360.8} $$
ページ:
