Graphic Controlerの再設計
引き続き、従来設計ではVerilogで設計していたものを勉強の目的からBSVに置き換えます。Graphic ControllerはVRAMへアドレスを出力し、VRAMデータを読み出し、また水平同期、垂直同期、表示期間等のタイミング信号を作成するモジュールです。
ついでにSVGAのタイミング変更をします。SVGAタイミング(魚拓)によれば、SVGA Signal 800 x 600 @ 75 Hz timingは以下のとおり。
| Screen refresh rate |
75 Hz |
| Vertical refresh |
46.875 kHz |
| Pixel freq. |
49.5 MHz |
ここで、Screen refresh rateは垂直同期信号周波数で、フレームのライン数(625)から自動的に決まります。Vertical refreshは水平同期信号周波数で、ラインのピクセル数(1056)から自動的に決まります。従ってここで重要なのはPixel freq.のピクセルクロック周波数のみです。
- Horizontal timing (line)
| Scanline part | Pixels | Time [µs] |
| Visible area |
800 |
16.161616161616 |
| Front porch |
16 |
0.32323232323232 |
| Sync pulse |
80 |
1.6161616161616 |
| Back porch |
160 |
3.2323232323232 |
| Whole line |
1056 |
21.333333333333 |
ラインの総ピクセル数は他を合計すれば自動的に決まります。
- Vertical timing (frame)
| Frame part | Lines | Time [ms] |
| Visible area |
600 |
12.8 |
| Front porch |
1 |
0.021333333333333 |
| Sync pulse |
3 |
0.064 |
| Back porch |
21 |
0.448 |
| Whole frame |
625 |
13.333333333333 |
フレームの総ライン数は他を合計すれば自動的に決まります。
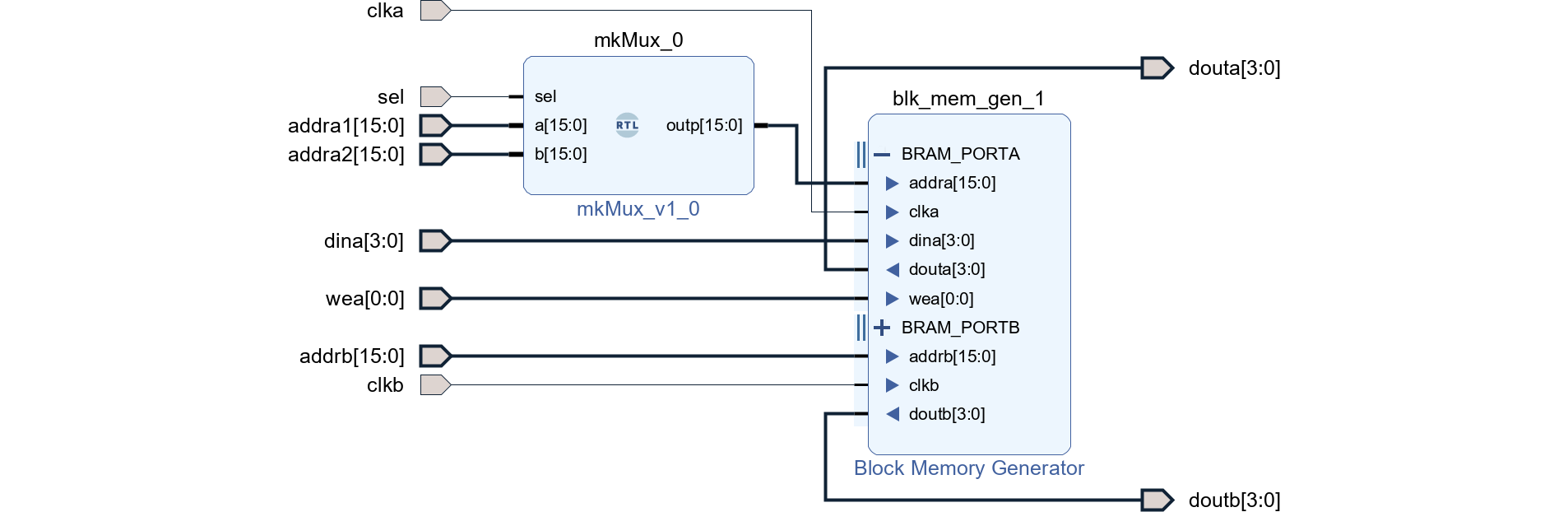
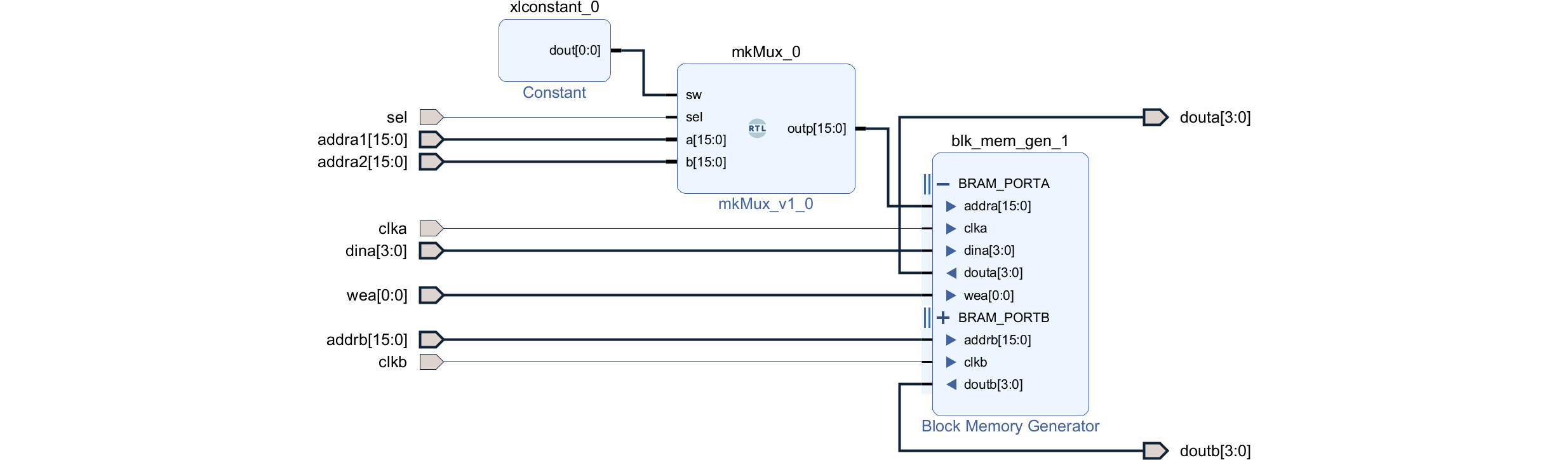
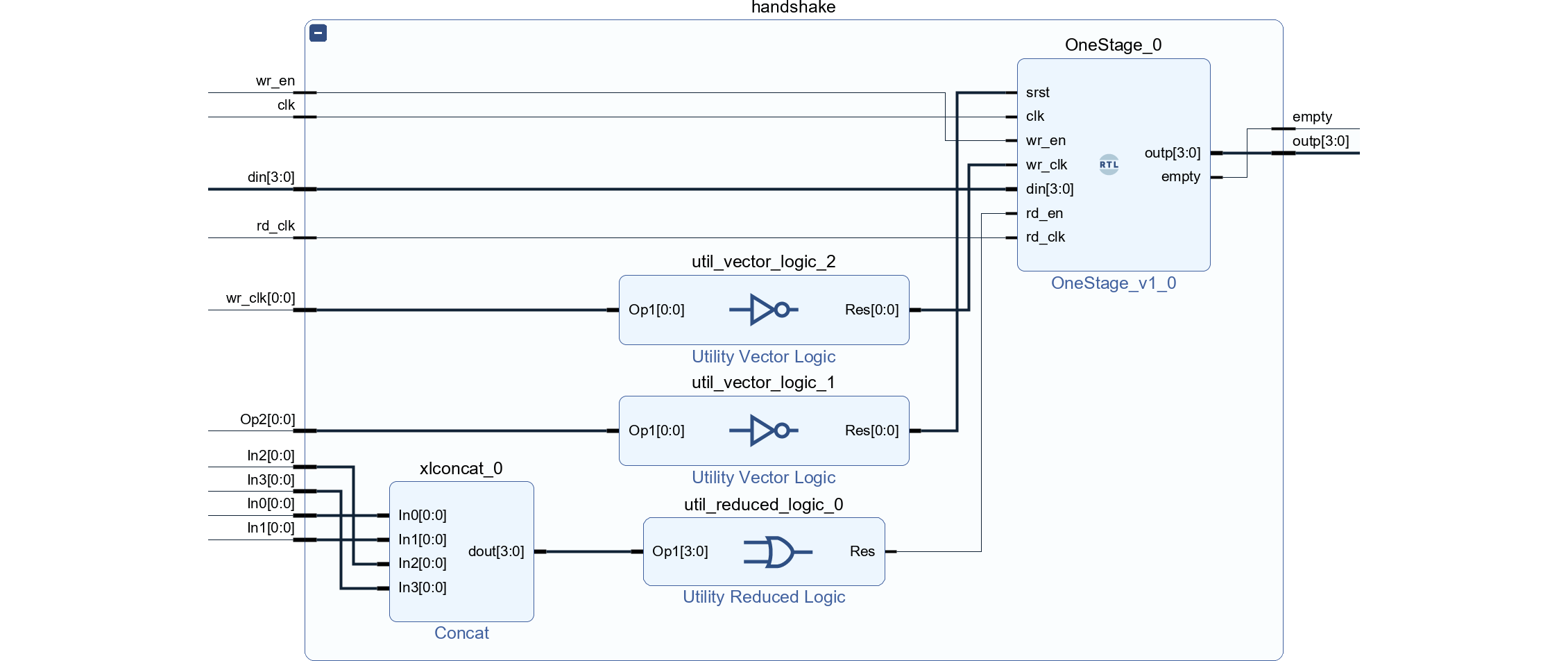
Verilogによる設計(過去記事)では、水平カウンタ、垂直カウンタを別々に設け、水平のタイミングデコーダと垂直のタイミングデコーダにより同期信号等を作成していました。また、自機が破壊された場合に全画面を赤色表示にするモジュールを図414.2のように、後段に接続していました。また、VRAMデータ4bitのうちRGBを表す3bitを取り出すために、xisliceモジュールを用いていました。
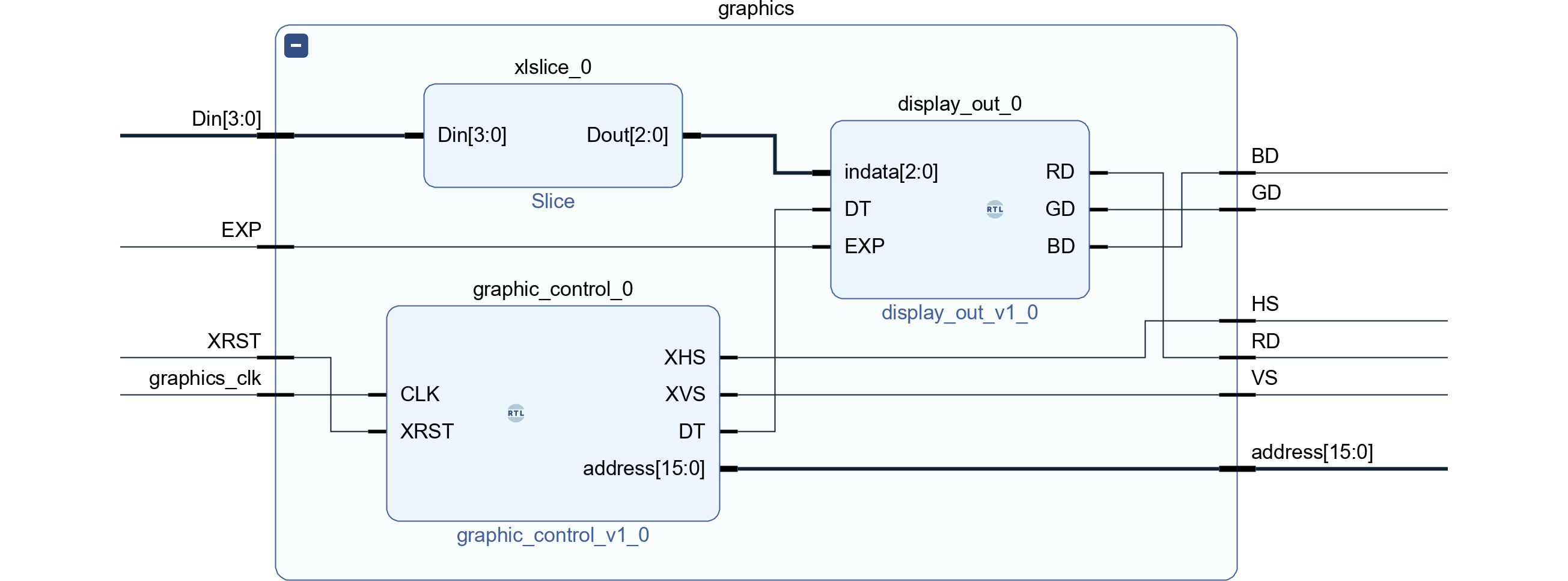 図414.2 従来のグラフィックコントローラ階層図
図414.2 従来のグラフィックコントローラ階層図
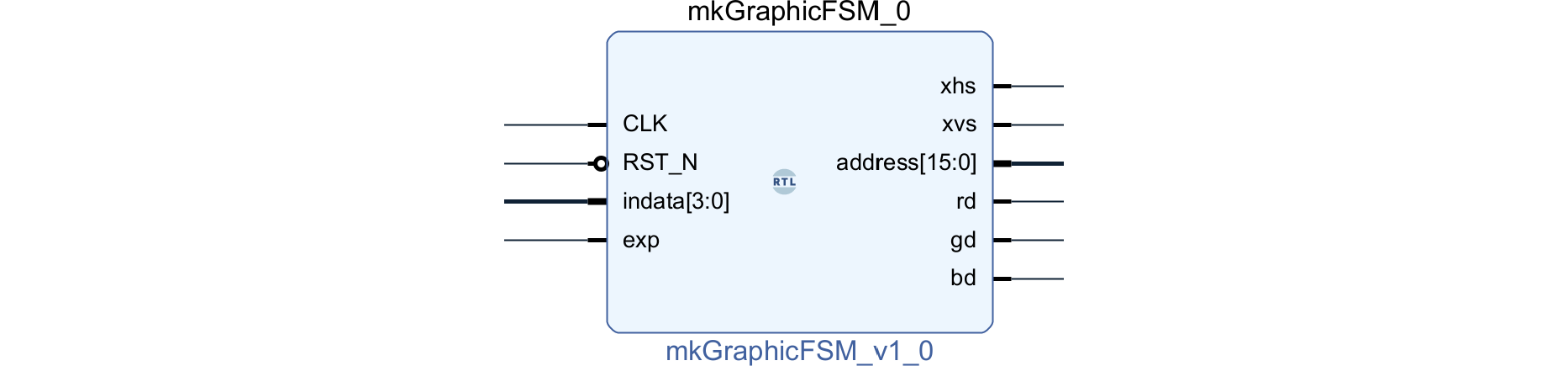
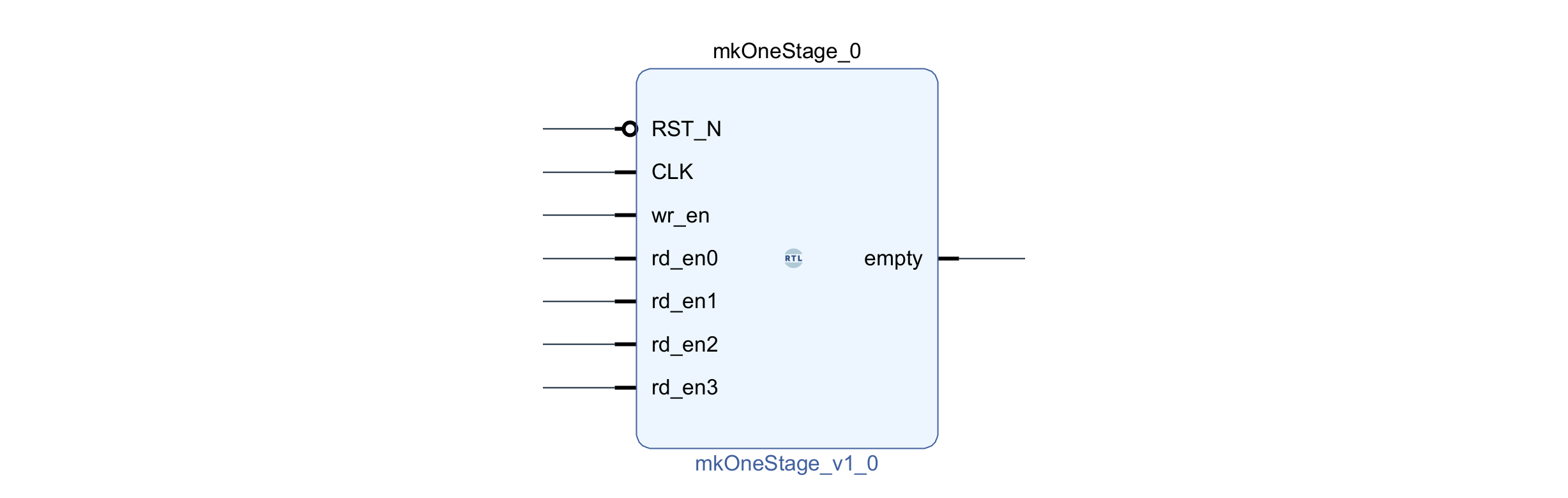
今回BSVで再設計するにあたり、3個に分かれていたモジュール構成を1個にまとめます。
アルゴリズム説明
Graphics.bsvの中心部分:
y <= 0;
while (y < `VL) seq
// for (y <= 0; y < `VL; y <= y+1) seq
x <= 0;
// for (x <= 0; x < `HL; x <= x+1) action --- "for statement" consumes two cycles, so we like to use "while"
while (x < `HL) action
if (((`HD+`HFP)<x)&&(x<=(`HD+`HFP+`HSP))) in_xhs <= False;
else in_xhs <= True;
if ((ehoff<x)&&(x<=ehoff+`EHD)) in_hdt <= True;
else in_hdt <= False;
x <= x + 1;
if (((`VD+`VFP)<y)&&(y<=(`VD+`VFP+`VSP))) in_xvs <= False;
else in_xvs <= True;
if ((evoff<y)&&(y<=evoff+`EVD)) in_vdt <= True;
else in_vdt <= False;
endaction // for -> while
y <= y + 1;
endseq // for -> while
このように、y方向とx方向の2次元方向にドットクロックを数えます。コメントされている行のように、本来for文を2重で回したいのですが、資料事例で学ぶ BSVからの引用の図509.1に示すように、Stmt文内のfor文は2サイクルかかることに注意します。
 図509.1 for文とwhile文
図509.1 for文とwhile文
一方、while文は初期化に1サイクルかかるものの、インナーループでのチェックとアクションを1サイクルで実行できます。
for文のインナーループが2サイクルになるということは、2倍の周波数でFSMを駆動しなければならないことになります。現行では49.5MHzなので2倍では99MHzとなり、FPGAの上限に近くなってしまいます。
念のため99MHzで動作するfor文を用いたケースを合成し、正常動作を確認しましたが、タイミングクロージャや発熱等を考えると、回路はなるべく低速で回した方が望ましいです。
一方whileループであればインナーループが1サイクルで良いため、一旦for文で書いてから等価なwhile文に書き換えます。
 前のブログ
次のブログ
前のブログ
次のブログ