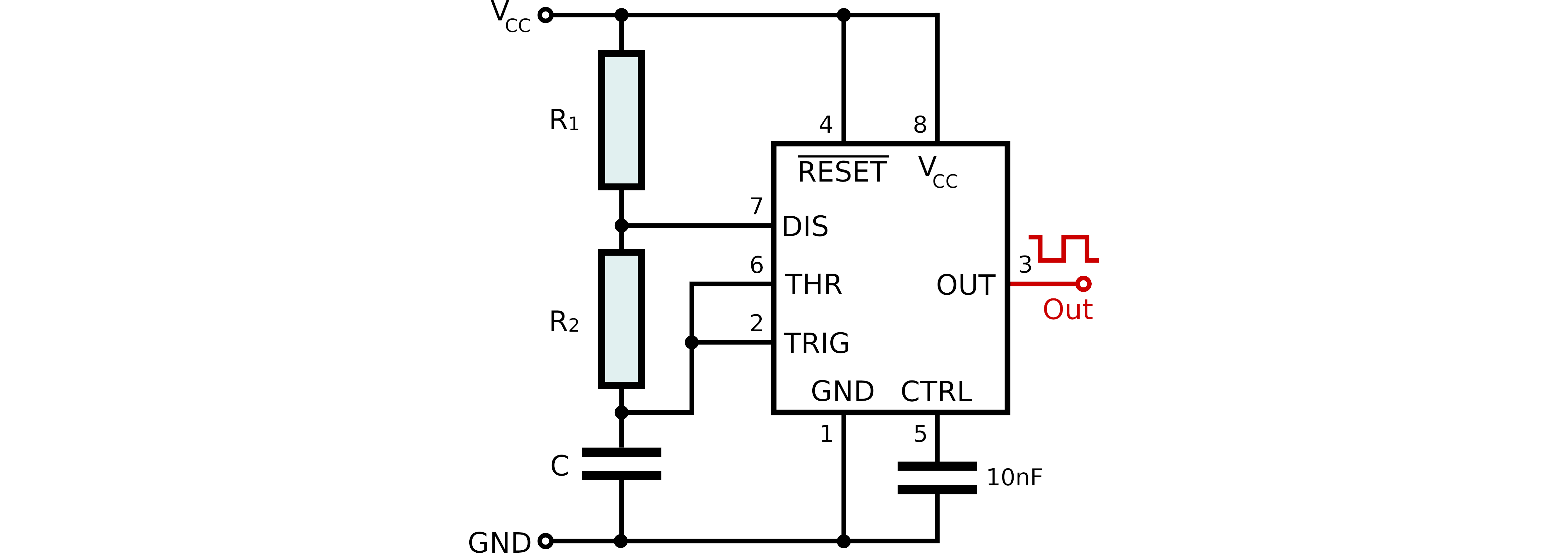
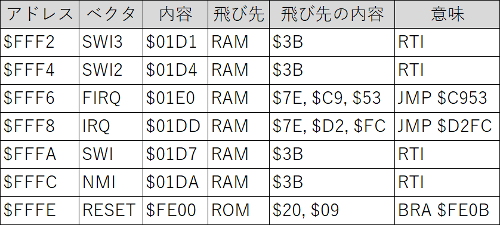
6809 IPは、Verilogステートマシン設計されているため、Vivadoのロジックシミュレータでステート毎に値をチェックして行きました。飛び先である\$FF12を用意されているものの、PCに書き込まれていないことが判りました。とは言え、JMP命令は正しくデコードされ、内部信号のop_JMP(JMP命令であることを示すデコード信号)は正しく出力されています。
 図162.1 修正前の6809CPUの動作
図162.1 修正前の6809CPUの動作
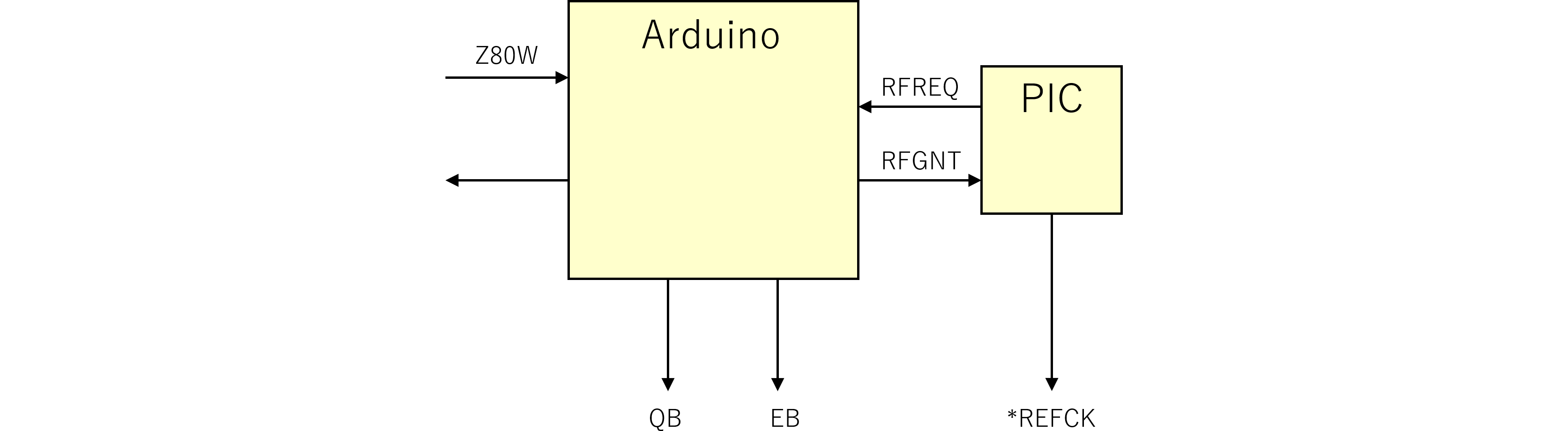
ステート遷移を修正し、レジスタ書き込みで終わっている箇所をジャンプステートに修正し、さらに、PCへの書き込みアサートを追加しました。
ステートの遷移は、修正前が、0f,16, 17, 18, 19, 11, 12, (09=次の命令フェッチ)のようになっているのに対して、修正後は0f, 16, 17, 18, 19, 1b, (09=次の命令フェッチ)のように遷移し、かつ、オレンジ色で示したk_write_pc信号がアサートされ、new_pcである\$FF12\$FF12がPCにセットされています。結果として正しく\$FF12にジャンプしています。
 図162.2 修正後の6809CPUの動作
図162.2 修正後の6809CPUの動作
修正前は誤ってステートが、\$11(SEQ_GRAL_ALU), \$12(SEQ_GRAL_WBACK)と、レジスタ書き込みのステート遷移となっているのに対して、修正後は\$1b(SEQ_JMP_LOAD_PC)と、JMP命令のステートに遷移しています。
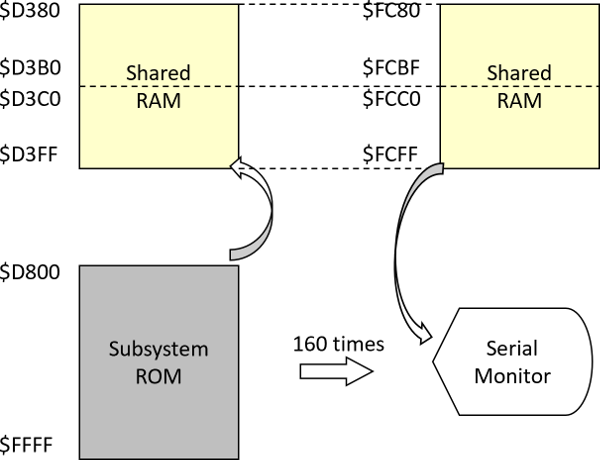
例えばメインフレームのような大型機をどのようにテストしているかと言えば、もちろん単体命令をひとつづつテストすることも行いますが、キャッシュ、仮想記憶、ページングの記憶階層があります。そのためのタイミングによるバグの可能性があるので、ランダム試験を実施します。命令を乱数で発生し、ただし不正命令とはならないように制約をかけ、ソフトシミュレータで正解値を取得します。これを論理シミュレータにかけ、結果値であるレジスタの値やメモリの値が正しいかをチェックします。メモリの値はひとつずつチェックすることなく、領域のチェックサムを取ることで確認します。
さらにこれを発展させ、実機にランダムプログラム生成プログラムを載せて、実行時に正解値を生成しチェックします。一見バグ値どうしを比較してOKとなりそうですが、いろいろと条件を変え、命令をページクロスさせて前半と後半でキャッシュやページのヒットミスを変えることで、演算値が変わることがあり得ます。これはプロセッサがパイプライン動作していることから、バグによってはタイミングによって結果が変わることがありうるためです。
ということで、メインフレーム並みの信頼性を保証するなら、上記のようなテストを実施しなければなりません。
 前のブログ
次のブログ
前のブログ
次のブログ