|
30 |
PMHF規格第1式の導出 |
主機能フォールトによるVSGの場合のPMHF計算
前稿で目的の微小不稼働確率が求められたので、主機能フォールトに関するPMHFこと時間平均PUDを計算します。(61.5)に(62.3)を適用し、(60.6)及び(60.8)を適用すれば、PMHFの式は、 $$ M_{PMHF,M}=\overline{\varphi_{M}}\approx(1-K_{M,FMC,RF})\lambda_M\\ +\frac{1}{2}K_{M,FMC,RF}\lambda_M\lambda_{SM}[(1-K_{SM,FMC,MPF})T_{lifetime}+K_{SM,FMC,MPF}\tau_{SM}]\\ =\lambda_{M,RF}+\frac{1}{2}\lambda_{M,DPF}(\lambda_{SM,DPF,lat}T_{lifetime}+\lambda_{SM,DPF,det}\tau_{SM})\tag{63.1} $$ となり、これはPart10 8.3.3PMHF規格第1式の
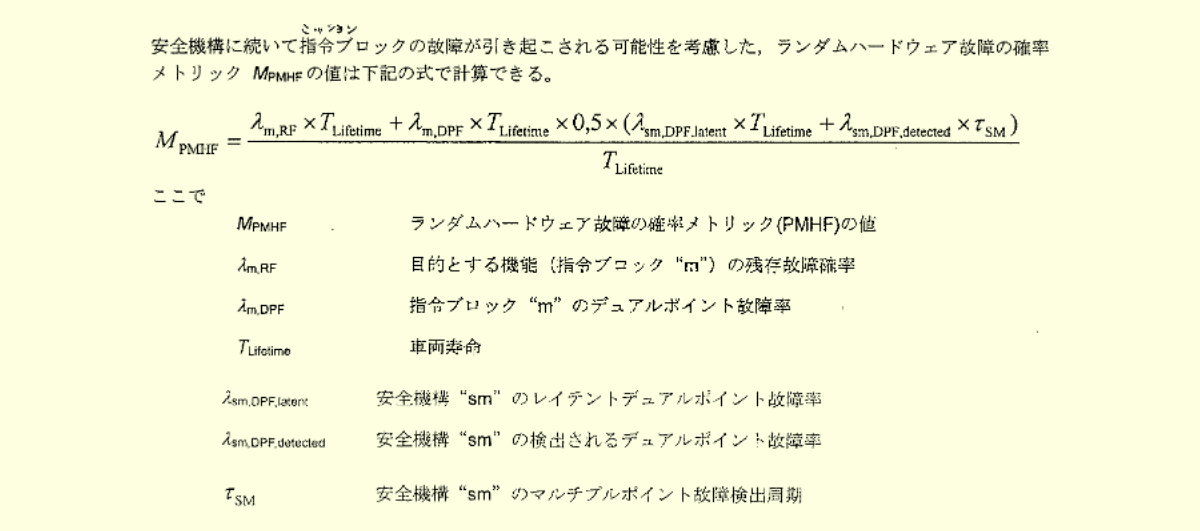
と正確に一致します。ただし、条件に「安全機構に続いて指令ブロックの故障が引き起こされる可能性を考慮した」とあり、「SMのフォールトの後に主機能がフォールトする場合」と読めますが、以前PMHFの意味でも述べたように、(訳文ではなく)原文の誤りと思われます。その理由は、SMがフォールトしている場合は主機能フォールト抑止ができず、従って$\lambda_{RF}$とはならないからです。残余故障率が存在するためには、SMが稼働している必要があります。さらに、この場合、probabilityの訳語としては可能性よりも数学用語である確率のほうが適当です。
正しくは前稿までに見たように、OPR→SPF(安全機構のフォールトが無い状態で主機能フォールトの場合)及びLAT2→DPF(規格の条件どおり、安全機構に続く主機能のフォールトの場合)の2条件の和となります。つまり規格第1式は、安全機構のフォールトの有無を問わない、主機能フォールトによるVSG確率を意味しています。
順番については表で表した方が分かりやすいため、以下に4つのケースを示します。
| 第1のフォールト | 第2のフォールト | VSG | |
|---|---|---|---|
| Case 1 | M | - | 〇(SPF/RF) |
| Case 2 | M | SM | 〇(DPF) |
| Case 3 | SM | - | × |
| Case 4 | SM | M | 〇(DPF) |
規格第1式の条件である、「SMのフォールトの後に主機能がフォールトする場合」はCase 4のみを意味していますが、実際には数式は、主機能フォールトによるVSG確率、つまりCase 1とCase 4の場合の両方を意味しています。直観的にも理解されるように、 $$M_{PMHF,M}=\lambda_{M,RF}+\frac{1}{2}\lambda_{M,DPF}(\lambda_{SM,DPF,lat}T_{lifetime}+\lambda_{SM,DPF,det}\tau_{SM})\tag{63.1再掲}$$ の第1項がCase 1を、$\frac{1}{2}$以降の第2項がCase 4を表しています。