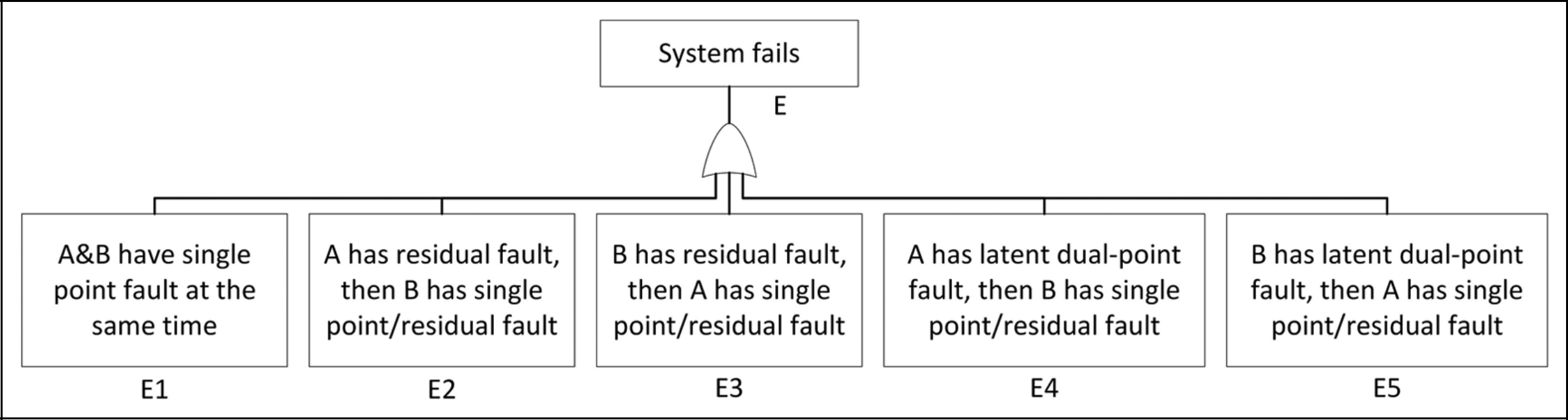
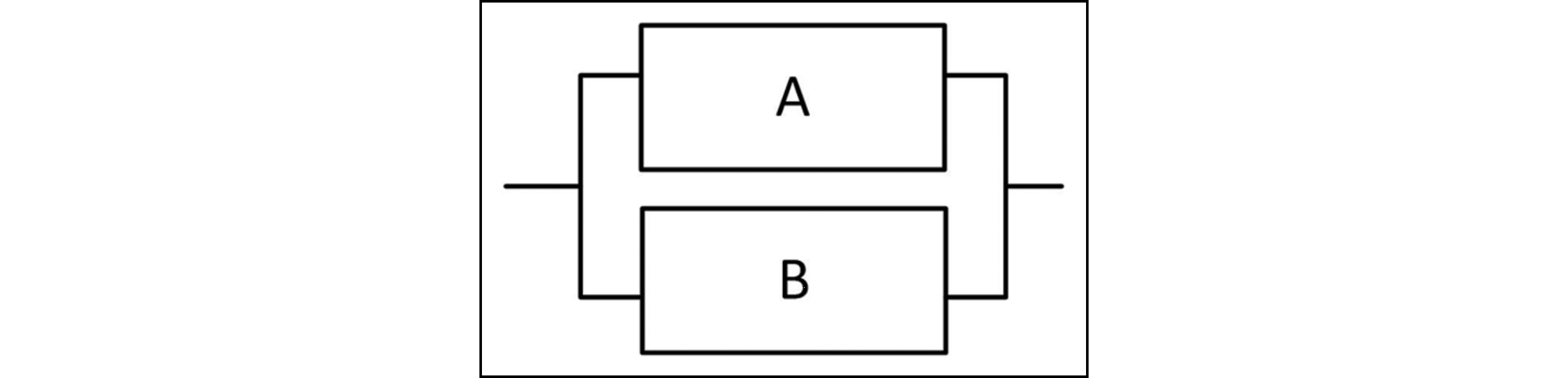
ここで前稿の図207.1の左端の事象E1について、削除した理由を再度検討します。AとBの同時故障(フォールトですが、わかりやすく故障と表現します)とは2とおり考えられます。
C1. AとBが時刻tで同時に故障する場合
C2. AとBが時刻tまでに両方共故障している場合
ただし、事象に重なりが無いように、C2.を以下のように書き換えます。
C2. AとBが時刻tまでに両方共故障している場合でC1(同時故障)の場合を除く
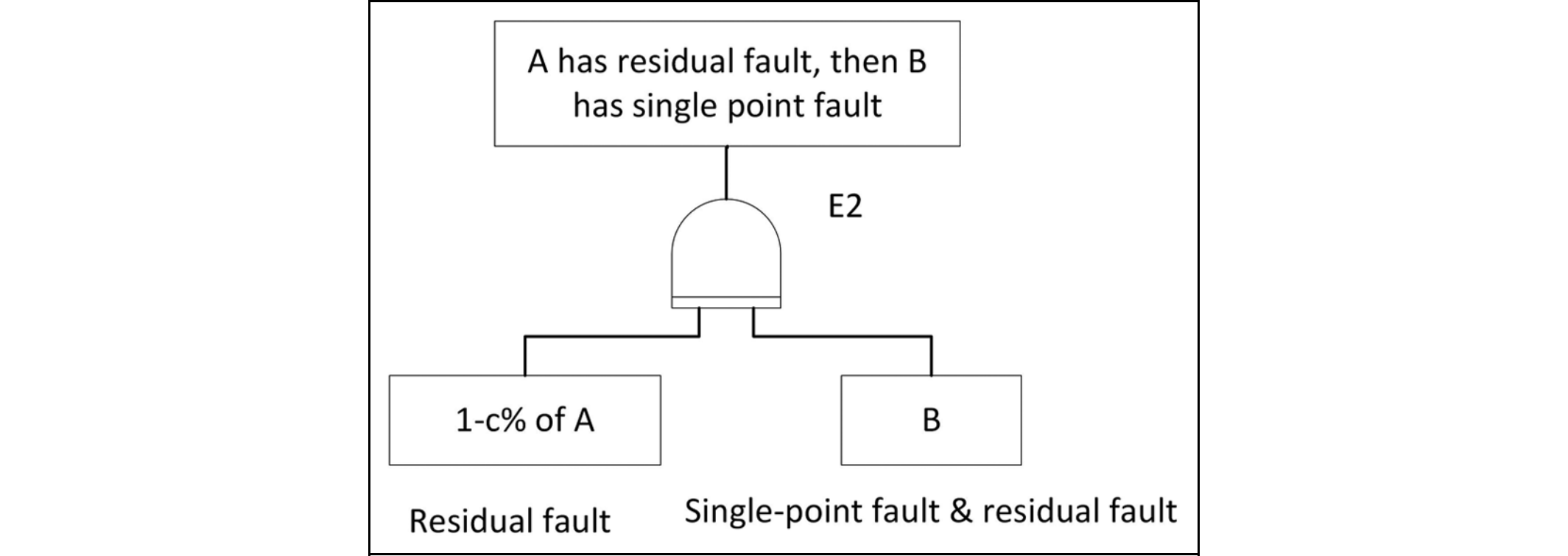
どちらもANDゲートを用いて図208.1(参照論文の図)のように表現されますが、
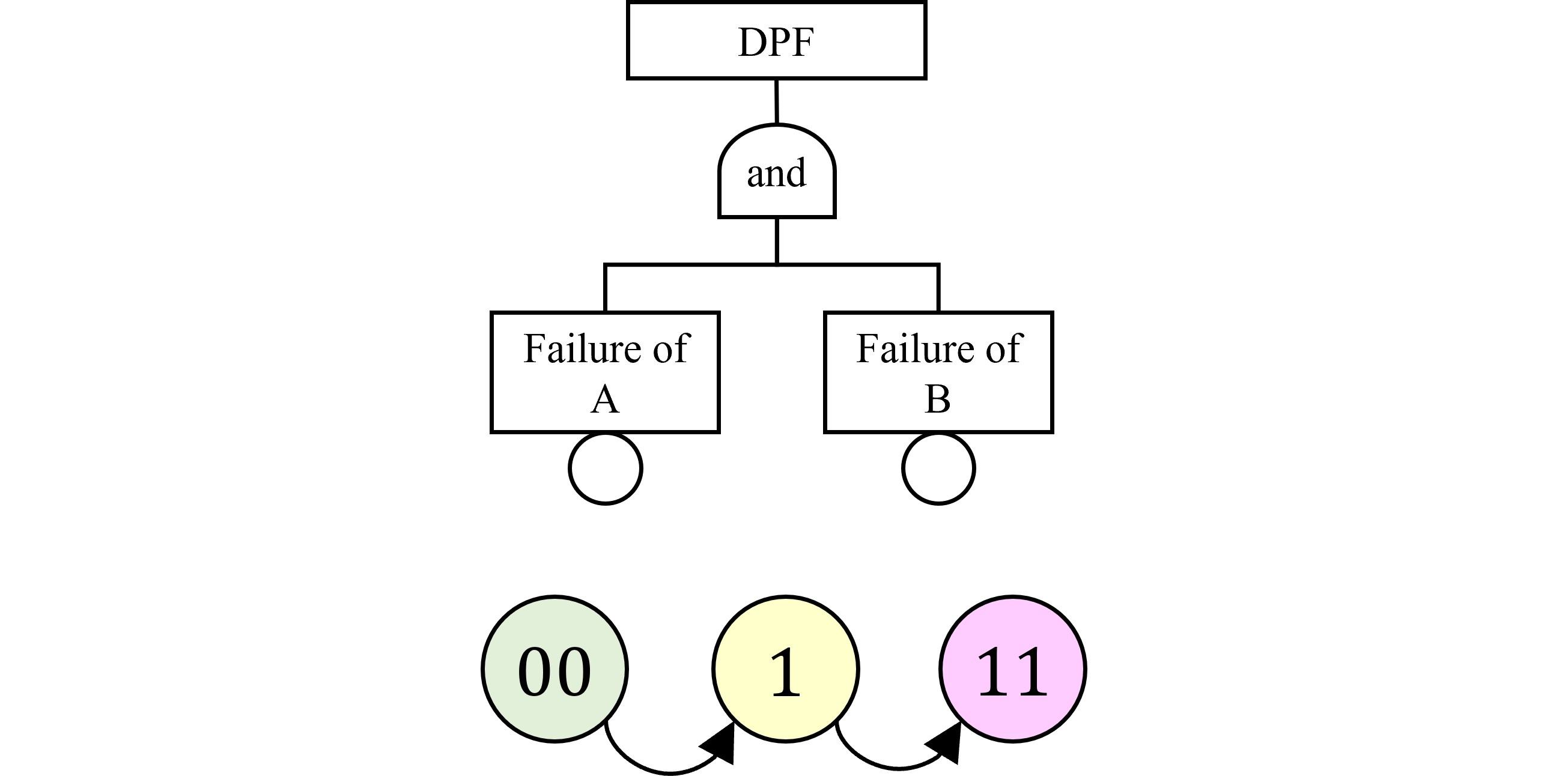
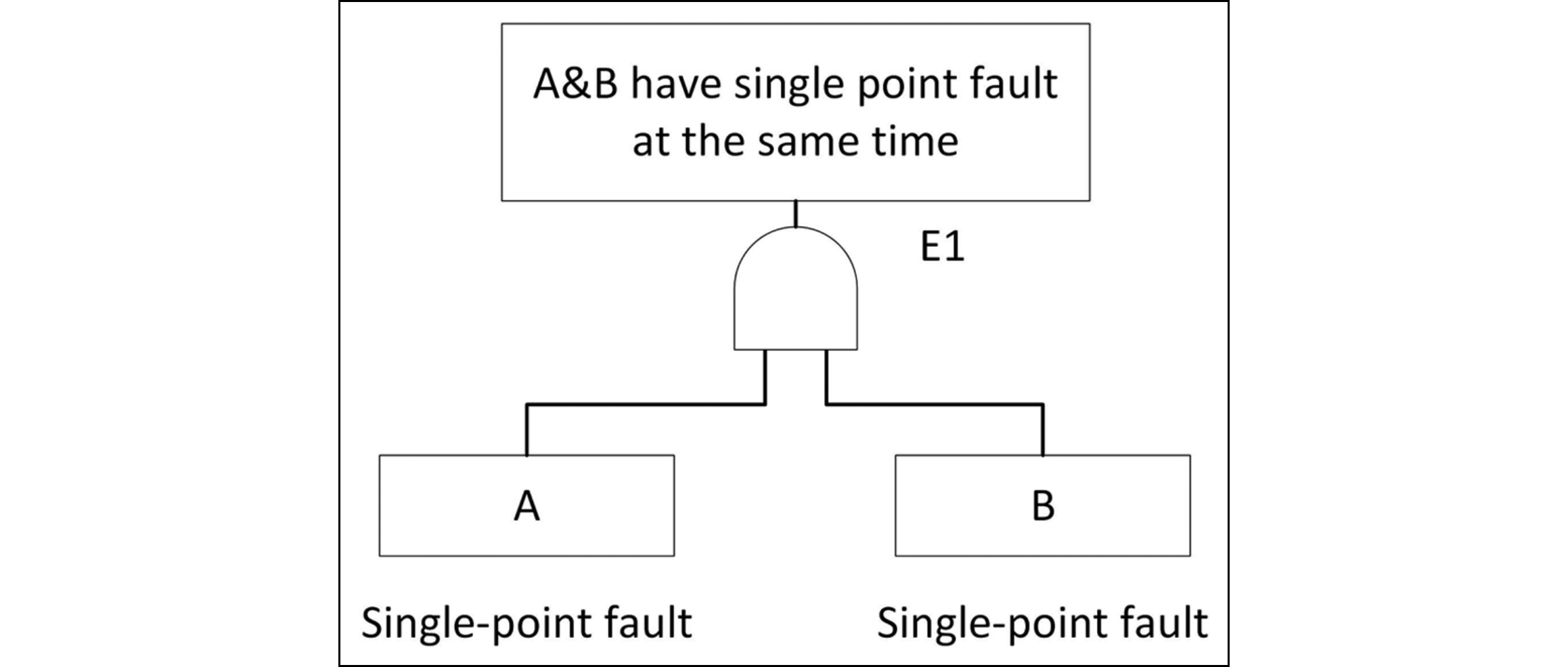 図208.1 DPFのFault Tree(参照論文の図)
図208.1 DPFのFault Tree(参照論文の図)
前述のように、C1は誤りです。同時に故障するDPF確率はほぼ確実にゼロだからです。一方、C2の場合は妥当です。区間$[0, t)$においてAが故障し、それと独立に、区間$[0, t)$においてBが故障する確率はそれぞれの値を持ちます。時刻$t$においてその両方が起きているDPF確率は、(AとBの故障が独立に起こる場合)それらの確率の積で表される値だからです。
それでは、前稿の図207.1の左端の事象E1は上記のどちらの意味でしょうか?
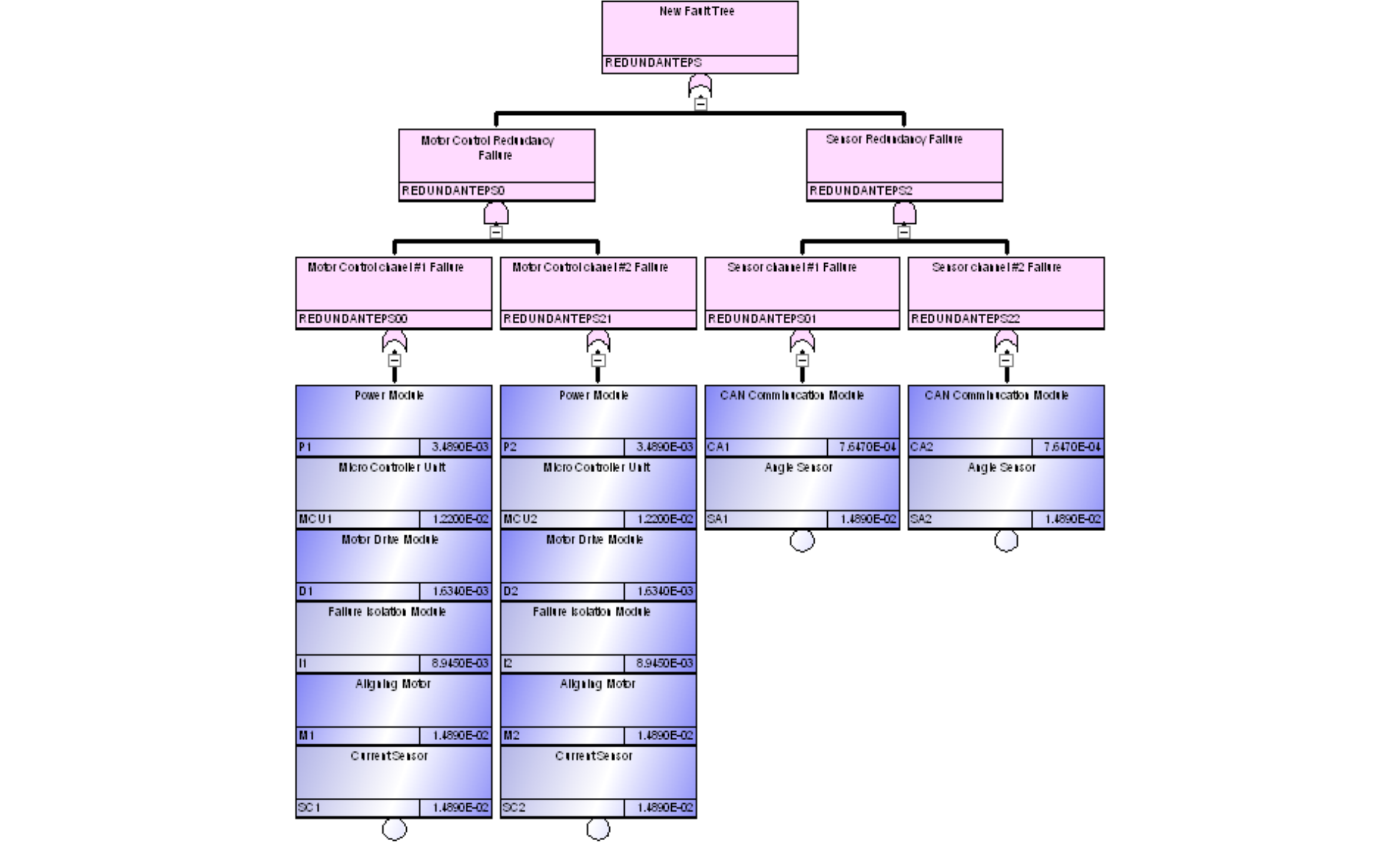
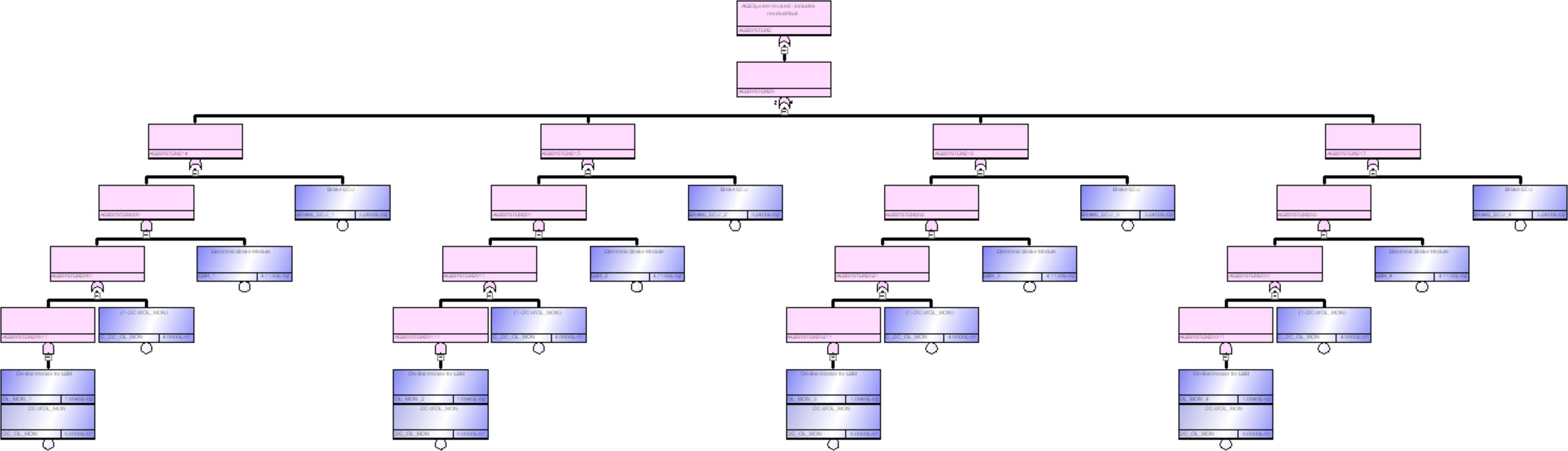
図208.2に前稿の図207.1を弊社で書き直した図を示します。E1, E2, E3を削除しています。
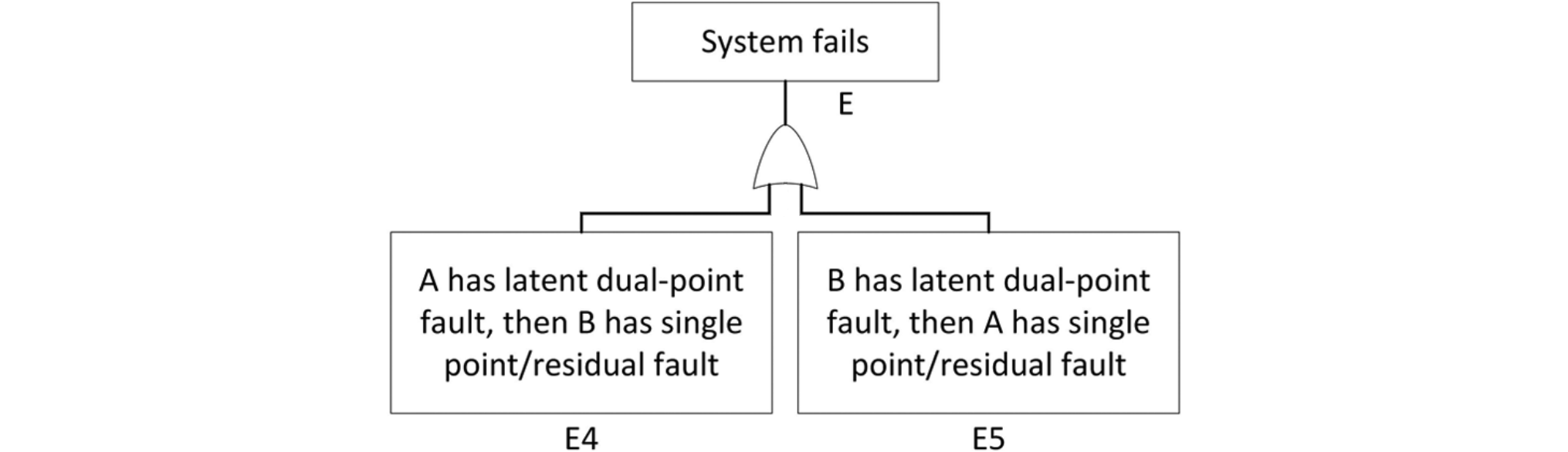 図208.2 図207.1の書き直し図(弊社作成)
図208.2 図207.1の書き直し図(弊社作成)
E1, E2, E3を削除しE4とE5が残ったのですが、E1をC1と判断し削除した理由を確認します。上記のC2の場合かもしれないので。
さて、E4, E5はそれぞれ、
- E4: Aが故障してレイテントとなっており、次にBが故障した場合
- E5: Bが故障してレイテントとなっており、次にAが故障した場合
まず、C2ならばE4 or E5が成り立つかを証明します。「AとBが時刻tまでに両方共故障している」ならば、C2の定義からAとBが同時に故障することは無いので、Aが先に故障するか、Bが先に故障するかのいずれかです。AがSPF/RFの場合はVSGとなるので、AとBのDPFとなる場合は、Aの故障はLFしかありません。Bも同様なので、E4又はE5が成立します。従って、
$$C2\to (E4\lor E5)\tag{208.1}$$
次に逆を証明します。E4の場合には当然C2が成り立ちます。またE5の場合にも当然C2が成り立ちます。これは同時に成り立つため、E4ならばC2かつE5ならばC2が成り立ち、
$$(E4\to C2)\land (E5\to C2)\tag{208.2}$$
ここで、$\to$(ならば)をwikipediaで調べると、論理包含に、以下の性質があるとあります。
$$P\to Q\Leftrightarrow\overline{P}\lor Q$$
これと分配則及びドモルガンの法則を用いて(208.2)式を書き換えれば、
$$(E4\to C2)\land (E5\to C2)
\Leftrightarrow(\overline{E4}\lor C2)\land(\overline{E5}\lor C2)\\
\Leftrightarrow(\overline{E4}\land\overline{E5})\lor C2
\Leftrightarrow\overline{(E4\lor E5)}\lor C2\\
\Leftrightarrow(E4\lor E5)\to C2\tag{208.3}
$$
従って、(208.1)かつ(208.3)より、
$$C2\Leftrightarrow(E4\lor E5)$$
以上から、排中律を用いれば、$E4\lor E5$がC2と等価ならば、E1は$\overline{C2}=C1$と等価と証明されます。
従って、事象E1(図208.1)はAとBが同時に故障するC1の場合を指すと証明でき、かつそれは確率ゼロのため、削除可能と判断できます。
 前のブログ
次のブログ
前のブログ
次のブログ