FS Micro Corporation (Headquarters: Nagoya, Japan), a provider of professional consulting services for functional safety (Note 1) of in-vehicle systems, has been accepted for publication in RAMS 2024 (Note 2), an international conference on reliability organized by IEEE (Note 3) on October 27, 2023. This is the fifth consecutive year that the author's paper has been accepted to RAMS. The author's paper also won the Best Paper Award at the 14th ISPCE 2017 (Note 4), an international conference sponsored by IEEE in 2017.
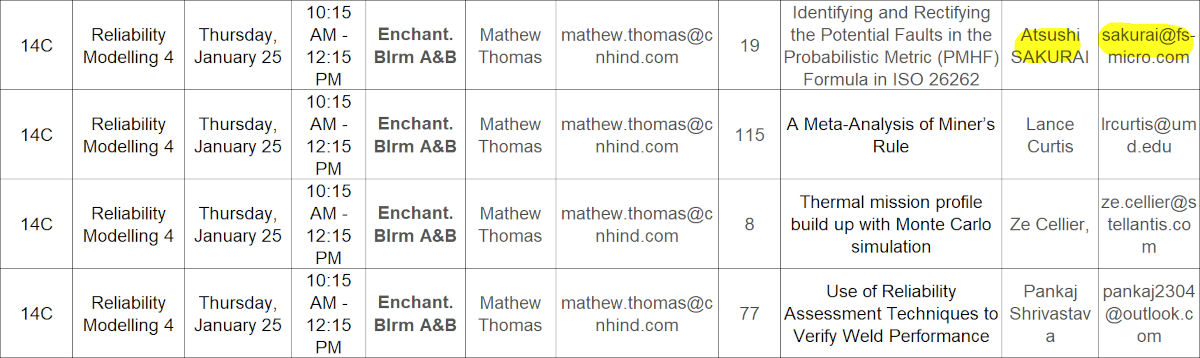
RAMS 2024 will be held January 22-25, 2024, at the Clyde Hotel in Albuquerque, NM, USA, and this presentation will be made during the Reliability Modeling 4 slot on January 25.

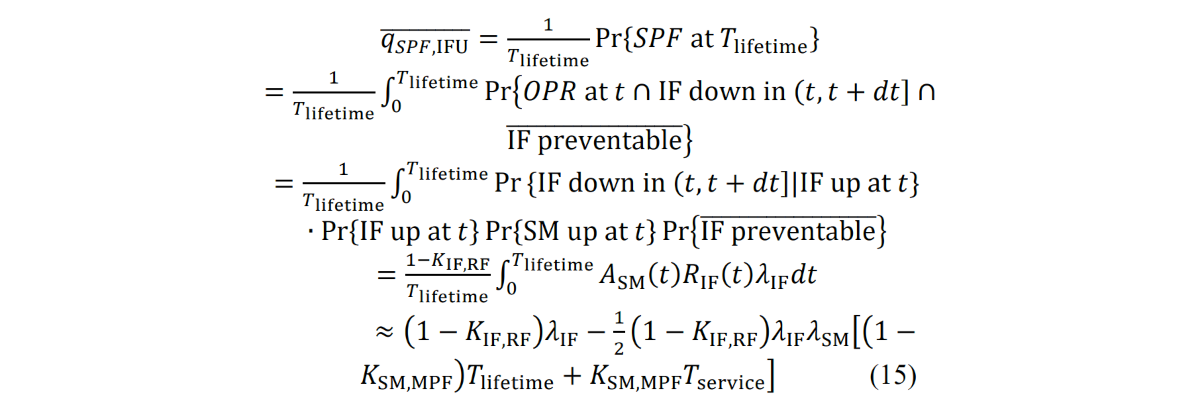
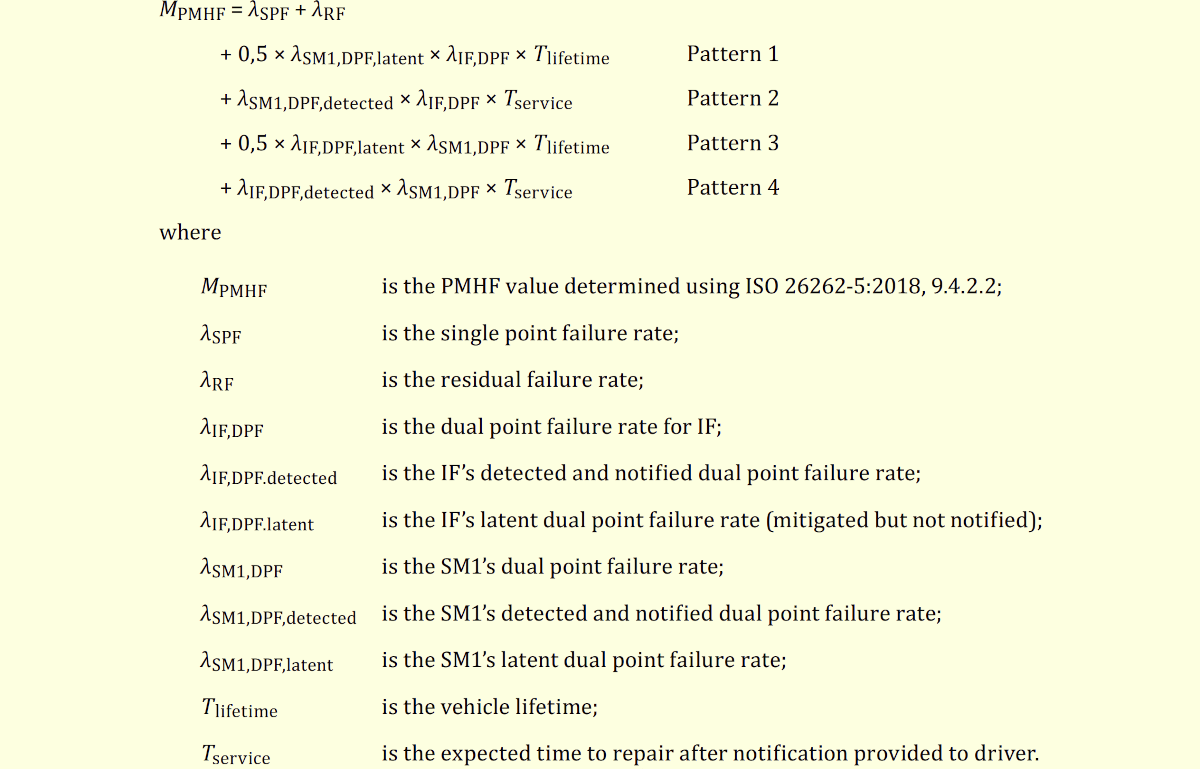
In 2018, the second edition of ISO 26262 (Note 5), the international standard for functional safety in automotive electronics, was published, and the PMHF (Note 6) equation was also revised. In RAMS 2020, the author clarified the mathematical background of the PMHF formula and proposed a new PMHF formula that can calculate more optimal values.
The title of this paper is "Identifying and Rectifying the Systematic Faults in the Probabilistic Metric (PMHF) Formula in ISO 26262."
The paper identifies 11 problems with the PMHF formula by analyzing the derivation process of the standard PMHF formula. It is then shown that correcting all of these problems results in a PMHF equation that is consistent with the previously proposed PMHF equation. Using the proposed PMHF equation prevents the overestimation of PMHF values. Therefore, this approach is expected to make the design of high-reliability systems, as typified by AD (Note 7), easier.
Contact Information
Company Name FS Micro Corporation
Representative Atsushi Sakurai
Date of establishment August 21, 2013
Capital 32 million yen (including capital reserve)
Business Description ISO 26262 functional safety consulting and seminars for in-vehicle electronic devices
Head Office Address 4-1-57 Osu, Naka-ku, Nagoya, Aichi, Japan
Phone 052-263-3099
E-mail address info@fs-micro.com
URL https://fs-micro.com/
Note 1: Functional safety is the concept of enhancing safety at the system level by implementing various safety measures.
Note 2: RAMS 2024 stands for The 70th Annual Reliability & Maintainability Symposium, an international conference on reliability engineering organized by the IEEE Reliability Division. http://rams.org/
Note 3: IEEE stands for Institute of Electrical and Electronics Engineers. It is the world's largest academic society for electrical and electronic engineering technology, both in terms of the number of participants and the countries involved. http://ieee.org/
Note 4: ISPCE stands for IEEE Symposium on Product Compliance Engineering, an international conference on product safety organized by the IEEE Product Safety Division http://2017.psessymposium.org/
Note 5: ISO 26262 is a functional safety standard for in-vehicle electrical and electronic systems. It is an international standard that aims to reduce to an acceptable level the possibility of safety goal violations due to failures of in-vehicle electrical and electronic systems during vehicle operation.
Note 6: PMHF stands for Probabilistic Metric for Random Hardware Failures. PMHF is one of the hardware design targets of ISO 26262, which is a time-averaged probability of safety target violations due to failures of in-vehicle electrical and electronic systems over the life of the vehicle.
Note 7: AD stands for Autonomous Driving.
 前のブログ
次のブログ
前のブログ
次のブログ