|
29 |
PUA関連論文Köhler2021 |
次は以下の論文です。
A. Köhler and B. Bertsche, “Cyclisation of Safety Diagnoses: Influence on the Evaluation of Fault Metrics,” 2021 Anuu. Rel. Maint. Symp. (RAMS), pp 1–7, Orlando, FL, USA, (Jan.) 2021.
アブストラクトの和訳を示します。
この技術的な詳細では、診断カバレッジ(DC)を伴う周期的安全対策に関連する意図された機能の確率的ハードウェア故障指標(PMHF)計算のための新しい数学的アプローチを導出する。これにより、指数故障分布の確率密度関数が安全診断の周期的影響に適応される、 さらに、適切な FTA モデルが説明される。これにより、PMHF 計算の現在のいくつかのアプローチが、対象とするユースケースに不適切であることが証明される。 分析と最新技術との比較により、このコンセプトの規範的・工学的な利点が示される: この新しい方法論は、車両パワーネットと安全診断の分野の例を用いて説明する。
このようにPMHF計算の新手法を提案しているようです。本当だったら大変に素晴らしいことですが、中身を見ていきます。
Those kind of diagnoses or safety measures, which have a significant influence of cyclisation, must not be treated as continuous systems in the safety validation process.
このような種類のサイクル化に大きな影響を与える診断や安全対策は、安全性検証プロセスにおいて連続システムとして扱ってはならない。
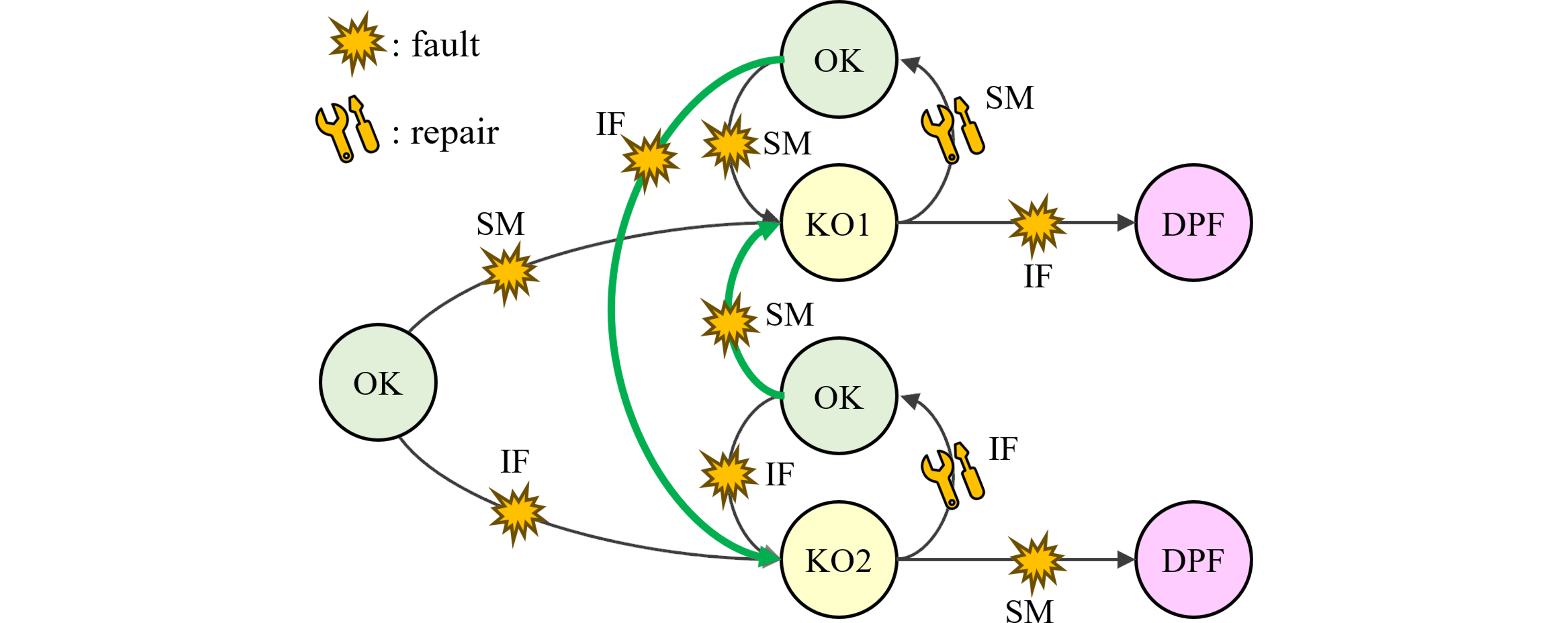
安全機構の種類については省略しますが、ここまでにおいて、この著者も1st SMと2nd SMの区別を記述していません。というのは
- 1st SMであれば、(真に連続的な診断ではないとしても)少なくともFTTIを満足するレベルの十分に高速な診断が必要となるし、
- 2nd SMであれば、1時間以上の十分に離散的な診断でOK
だからです。
これはフォールトの性質が異なるからであり、
- フォールトがVSGに直結するIFのフォールトであれば即時(FTTI中)の診断だけでなく安全状態への移行が必要になるし、
- SMのフォールトであれば、それはレイテントフォールトであるため、1時間以上の余裕を持った診断で良く、さらにドライバーが車両を運転して修理工場に運ぶことでもなんら問題はありません。
周期的な故障検出といってもFTTIが対象なのか、MPFDIが対象なのかで議論が全く変わってきます。